The RCExplorer webshop has permanently closed down. This post is here only for reference. This item is no longer sold.
If you wish to make your own, you can download the design files for free from here



Made for Bi, Tri and Quad copters.
The F3FC Racing flight controller was designed with 2 things in mind;
Performance and
cost. To achieve this we chose a 48 pin version STM32F303CC processor and the MPU6000 gyro/accelerometer chip.
The MPU6000 is the least vibration sensitive chip commonly available, which means crisper performance due to lower noise. It is connected through SPI instead of I2C, which allows for up to
8 times higher update rates. This together with the F3 chips capability of running lower loop times vastly improves the flight performance.
Using the 48 pin version of the F303 processor we managed to cut down on cost quite a bit. But you still get 3 UART’s, dedicated USB, 6 PWM’s, I2C, LED port, Current sensor port, Voltage reading and Servo feedback/RSSI. This is achieved by optimising pin connections until we almost went mad, but in the end we did manage it.
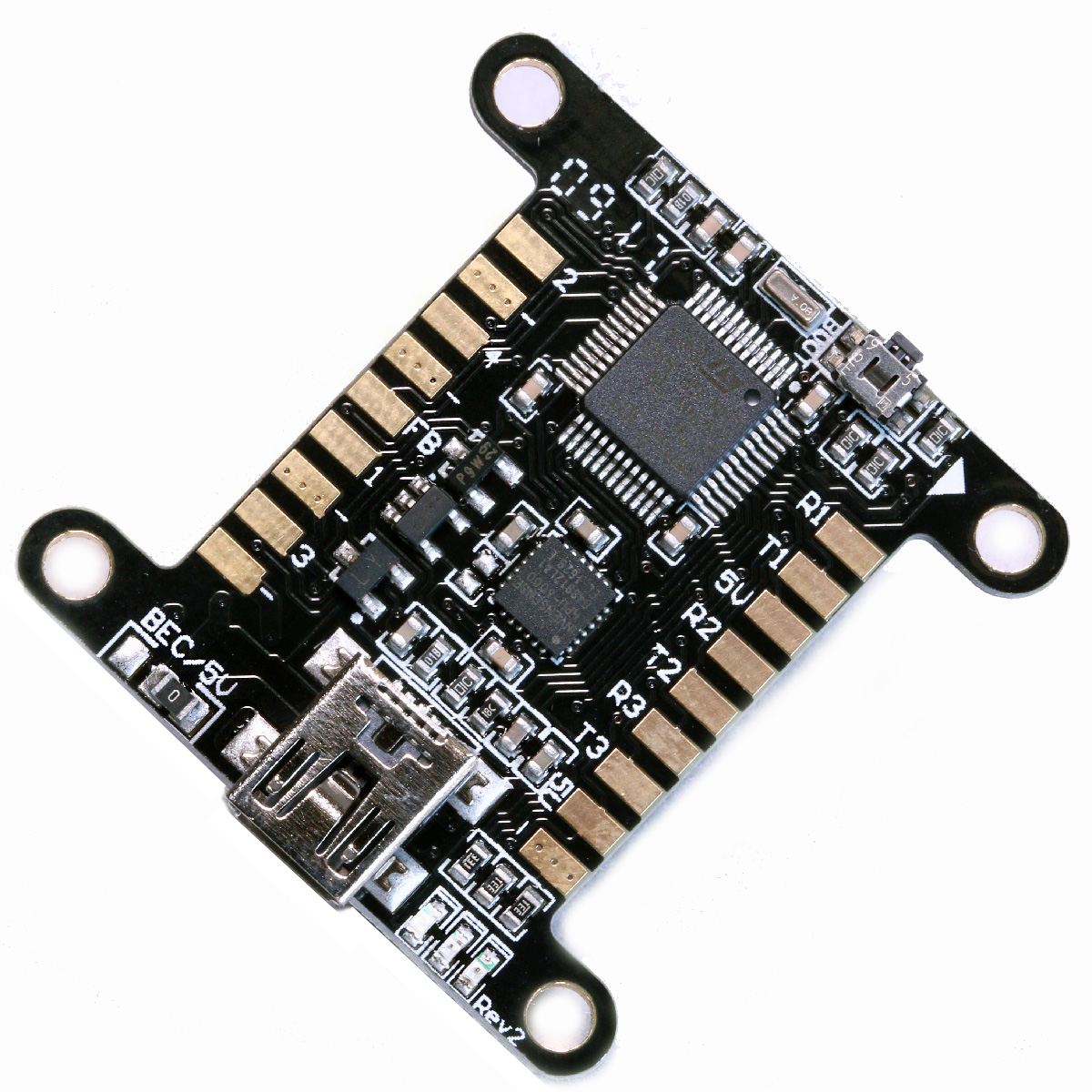
The F3FC Racing also has a built in 5V linear voltage regulator. This makes installation easy and clean as no external BEC is needed to power the board or the receiver. However it’s very easy to hook up an external BEC if you would like to power more power hungry things such as a servo, RGB LED’s or a OSD. Just remember to move the little resistor next to the USB connector to “BEC” or you might fry the board! I highly recommend checking out the BabyPDB, which besides being a 36x36mm power distribution board also has built in current sensor and a 3A switching BEC.
The F3FC Racing follows the 36x36mm (30.5mm hole spacing) form factor. It weighs 4.6g. The connection pads are located on the top and bottom edges of the board, just like the popular KISS FC and LUX flight controllers. An easily accessible side mounted boot button is located on the opposite side of the USB connector. This makes entering DFU mode as painless as possible.
This board uses a Mini USB connector instead of the Micro USB commonly used on flight controllers today. This is because the Mini USB is much less likely to break if you accidentally leave the cable in while moving your copter. I know I’m not alone in having destroyed at least one board this way. The F3FC Racing should be able to take a lot more of this kind of abuse.
PPM input is shared with PWM 6. For powering spectrum satellites a 3.3V pad is also available.
The F3FC Racing uses the same architecture as the F3FC tricopter board, which means that it uses the same hex file during flashing.
The F3FC boards are now supported by BetaFlight. Use target “RCExplorerF3” in the firmware flasher tab in the Betaflight configurator.
The F3FC boards are now supported by Cleanflight. Use target “RCExplorerF3” in the firmware flasher tab in the Cleanflight configurator.
Correct signal output for a quadcopters is:
Just like cleanflight/betaflight shows you on the configuration tab.
The correct signal output for a tricopter is:
Pad number 1 = Tail motor
Pad number 2 = Servo
Pad number 3 = Front Right motor
Pad number 4 = Front Left motor
Specifications:
- Processor: STM32F303CC
- Gyro: MPU6000 (8kHz SPI connection) (Interrupt pin connected)
- USB connector: Mini USB
- BEC type: Linear
- BEC voltage: 5V
- BEC current: 500mA (Not recommended to use more than ~100mA continuously)
Input voltage: 2-6S
- Material: 1.5mm thick G10/FR4
- Dimensions: 36x36xmm
- Hole spacing: 30.5mm
- Weight: 4.6 grams
Included in the package:
1 x F3FC Racing board
Don’t forget to get a beeper!
Known bugs;
> Connecting the MinimOSD to UART2 results in strange current readings. Connect either UART1 or 3 and it works as it should. Read more
here.
> Also, when using a minimOSD, NEVER EVER connect or disconnect it while either the F3FC or the minimOSD is powered. This can result in the board taking damage. This is true for all FC’s, not just the F3FC. The minimOSD is not kind to UART’s.

Leave a Reply
You must be logged in to post a comment.