
First of all why would you want to do this? My answer is:
– Panning of a FPV camera.
It’s so nice to be able to look 90° to either side and be able to see the wings. It makes the FPV experience feel even better. So how do you get 180° of rotation from a servo? There are 3 ways to do this;
1. Buy a “servo stretcher”
It’s a little device that is plugged in in-between the servo and receiver and “broadens” the PWM signal. This doesn’t require any modification to the servo but you need to watch out, not all servos can be used.
2. Buy a digital servo that is programmable
This can be quite expensive as the prize of the servo is higher and you need to buy the programing interface. But once you have these you have a nice digital servo that you can program to make 180° of travel without any modifications.
3. Modifying a servo with resistors
This is the method that I will show you here. It’s cheap and nearly any servo can be used. But you need some basic electronics understanding and be able to solder.
The servo I use in this guide is a Turnigy 1160A mini servo
We start of by disassembling the servo.

You need a small philips screwdriver.

This is the top piece of the servo. I want to get the absolute most travel I can get out of the servo, so I will remove the mechanical stop.

I used a dremel to remove the plastic limiter.

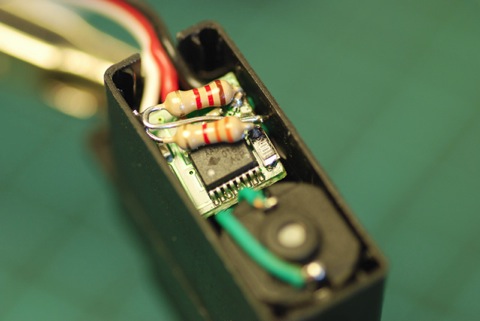
This is the circuit board that we will be modifying.

This is the way to hook up the resistors. In parallel with the pot.
Update: Some servos work better with the resistors in series with the pot.

Both parallel and series works but some servos works better with the resistors in series, other with the resistors in parallel. If the servo doesn’t work like “normal” except for 180° of movement after the modification, I recommend switching the configuration of the resistors.

Normally I would just solder two 2.2K ohms resistors in parallel with the pot.

But this cheap servo does not have its center in the middle of the pot, which results in 180° of travel in on direction whilst in the other direction it exceeds the pots max value, which results in the servo doing a 360° rotation. To fix this I hooked the servo PCB to my trusty experiment board and paralleled the pot with a couple of 20 turn 5k trim-pots to determine what values I needed.

I ended up with one 3.3K and one 1.2K. This resulted in nearly 180° of travel in both directions and perfect centering.


Original travel (with 100% EPA) <—–> Modified travel (with 100% EPA)

With a 180° servo it’s possible to get this view.
If you try it out be sure to leave a comment!
Leave a Reply
You must be logged in to post a comment.