
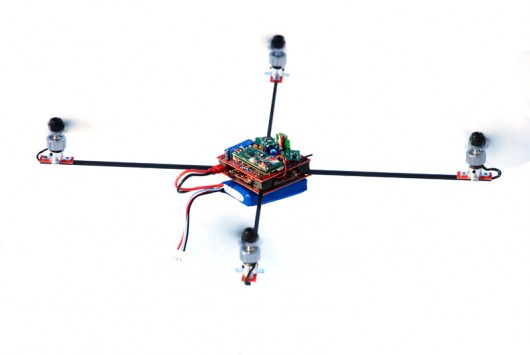
There are something very special about multirotor platforms. I can’t really put my finger on it but maybe it has something to do with how good they fly or how little noise they make. Anyhow I decided to build a small Quad just for the fun of it.

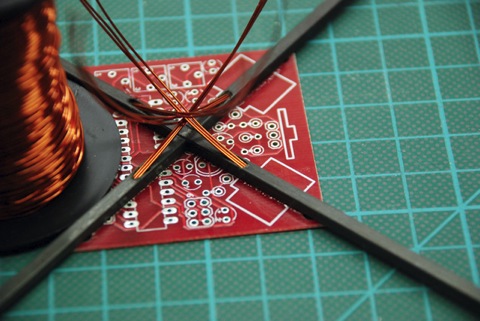
This is what I’m going to use for the frame. 3mm square carbon tubes and a unpopulated KK board I had laying around. The motors I’m planning on using are the 1404N 2290Kv 9.2g motors from Hobbyking. The prop in the picture is a 4*2.5” prop which says something about the scale.

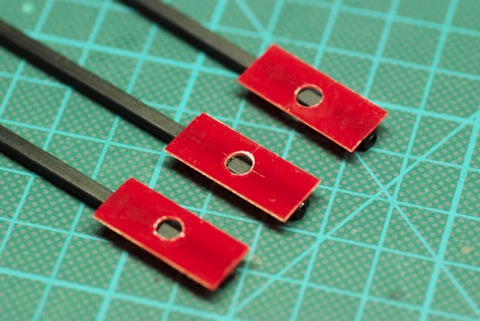
Time to make some motor-mounts. I used the edges of the KK board, which is 0.8mm glass fiber.

I had to drill a hole in the center for the motor axel.
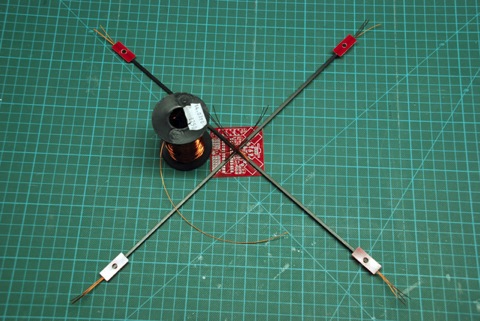
Glued straight on the arms.

Glued the arms together.
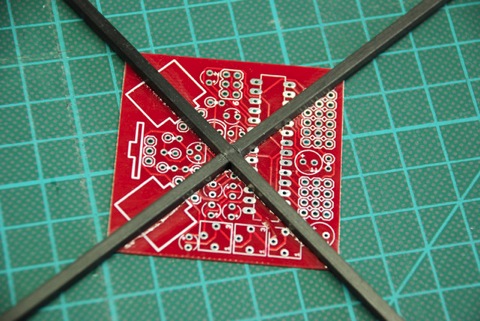
Glued the arms to the blank KK board.

The size of the frame ended up to be 22cm motor to motor and 31.5cm across.

Since the carbon arms were hollow I though it a shame not to use it to my advantage.
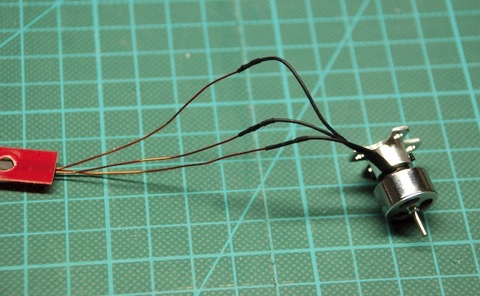
Internal wiring look so much nicer. I used coated copper wire I had laying around from rewinding motors.


Scrape the coating from the ends and solder the motor. Easy as pie

After some testing I noticed that the 1404N 2290Kv 9.2g motors did not work well at all. Something had to be off on them because they did not spin true. Not a single one of the four so I decided to ditch them and get some HexTronic 5g 2000kV motors instead. They much better and run perfectly smooth. Much better mounting plate as well.

Soldered on.
Heatshrink on.

Glued in place. I decided to go with glue as it saves weight and break away in a crash.
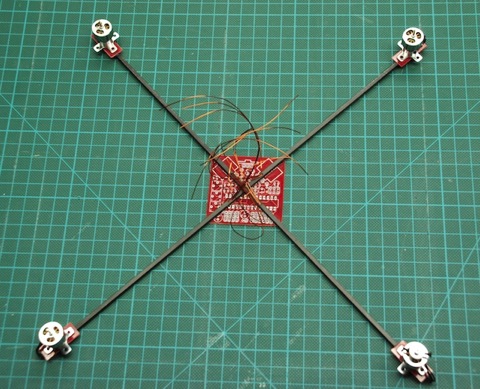
All four motors in place.
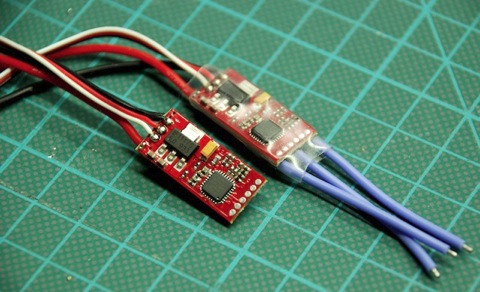
I used Turnigy Plush 6A ESC’s

Speedcontroller soldered and mounted using double sided foam tape.
Looks pretty neat so far.

We need a receiver on there as well but I can’t stand having something so bulky and heavy on this little thing so… Receiver! Activate!

Removed the pins and other unnecessary stuff.

The stock “boda” antenna was way to big an bulky so I made a simple whip instead. I’m not planning on flying that far with this little thing either way.

Soldered the signal wires straight board to board. The Optima receivers have a really neat function and that is built in voltage telemetry. That way I always know when it’s time to land without having to have anything extra on the model. Love it!

Started soldering the battery connector and power distribution to the ESCs

Done!
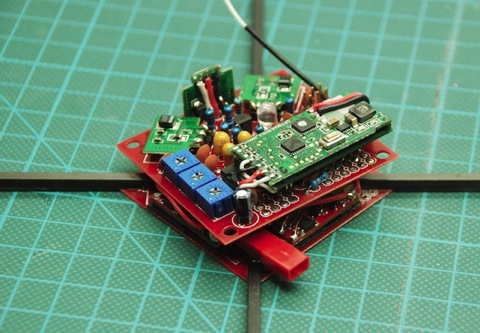
Just needs some foam for the board and it’s ready to fly.

Ready!

It’s pretty small

Needed a lot of tape on the 4*2.5 props to make them balance properly

It flies!

Outside in the cold

It flies outside as well.


Size comparison to some regular sized moose droppings, which is a standard unit here in Sweden, like a dollar coin in the US.
Here is the video!
I’m quite happy with the way it flies. It’s soooo cute! It so stable as well. I expected it to be very jittery, wobbly and all over the place but it feels so locked in. Love it!
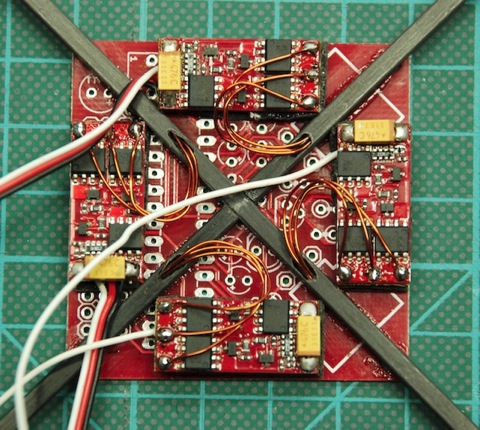
After flying the MiniQuad for a while I decided to increase the prop size. But then I ran into some trouble, the carbon tubes twisted under heavy load. To fix this and also make it more impact resistant I added a carbon square frame.

A little bit of extra carbon made all the difference.

The frame is now super stiff and the MiniQuad flies even better in fast forward now.

As a battery I used an old 2s800mAh 15C liPo I had laying around. Flight time is about 15 minutes.

Simply cut the corners at 45° angles and glued them to the motor mounts.
Specifications:
Motors: HexTronic 5g 2000kV
ESC’s: Turnigy Plush 6A
Battery: 2s800mAh 15C
Props: First 4*2.5 GWS then 5*3 GWS
Arm length: Motor to center 16cm (Radius). Motor to motor 22cm
All up weight: 89 grams without battery, with extra carbon rectangle.
Leave a Reply
You must be logged in to post a comment.