

Since the Carbon Y6 didn’t feel right for me, I decided to try out the DJI Wookong-M on a quadcopter instead.
I happened to spot this Gaui 500X frame from a local hobby store whilst I was there on other errand and decided to try it out.

The kit and the optional landing gear.

Everything in the box.
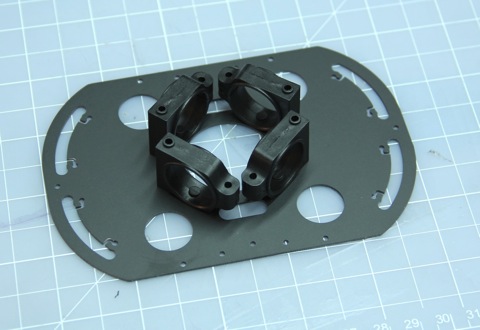
The frame is made from 1mm thick grayish-black glass fiber.

Inner boom clamps in place.

outer boom clamps in place as well as the frame stiffeners.

Middle frame done.

Motor mounts.

Screwed together.

I’ll be using T-motors on this quad. The model I’m using is the 2216 800KV.

Fits nicely.

Perfect match.

All motors screwed in.

Booms inserted and clamped.

Arms in place.


ESC’s soon done

After testflying the 500X I thought it was a bit to ”small” for my taste. So I decided to stretch it using some 22mm helicopter tail booms.

The 22mm booms didn’t really fit though so I had to cut 4 slots with a dremel to reduce the diameter slightly.

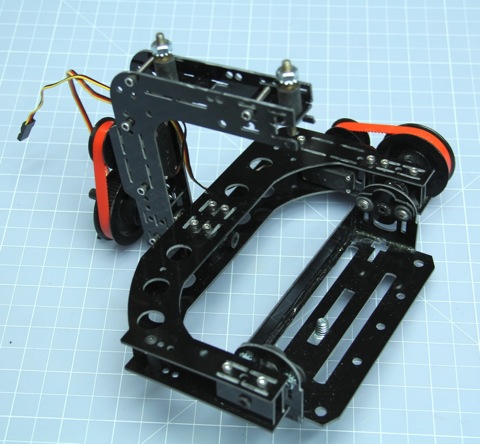
This is the gimbal I used in the Y6 build. I thought I would try using it in this project as well.

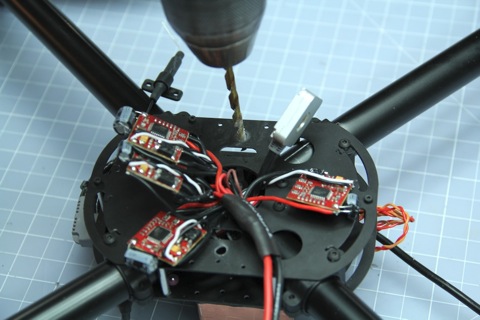
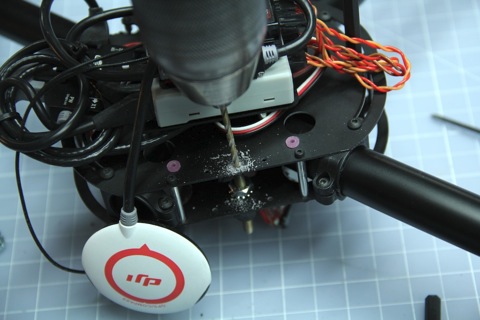
Drilling holes to mount the gimbal.

Rubber vibration mounts in place.

Gimbal in place.


Now I need somewhere to place the battery.


Bigger is better

Battery tray in place.

Works good enough.

Unfortunately I don’t really have any video of or from the quad except when I flew it over the Niagara falls:
The reason I don’t have any more videos is that I could not get the gimbal to work properly. It was always twitching and vibrations amplified in the construction. Also I didn’t really liked the 500X frame. The folding mechanism wasn’t really to my taste as well as a couple of other small little things. However I liked how the quad flew so I’ve decided to start design my own. Stay tuned!
Leave a Reply
You must be logged in to post a comment.