

A good friend of mine, Corey, who lives on the other side of the “pond” (the US) asked me if I wanted to help building a Mikrokopter Octocopter kit he recently purchased. I accepted right away. It’s not every day you get to build a 2000 dollar multi-rotor platform and compare it to your own 100 dollar platform.

This is the box everything arrived in. First I thought there had been a mistake. An Octocopter can’t possible fit inside this tiny little box?

Here it is compared to my folded tricopter (which btw is under reconstruction in this pic).

To my surprise the complete kit with motors, props, arms and everything was in there.

The “Flight controller” comes pretty much pre built. Only a few components needs to be soldered.

Done. The summer will be placed on one of the arms.

The eight ESC’s are soldered to a kind of distribution PCB. Pretty clever, and very clean.

All eight ESC’s soldered in place. Every ESC needs to be assigned the correct number by soldering a jumper on the board.

Time to build the frame.

Plastic mounts for the ESC’s.

Top and bottom mounted together.

The four main arms in place as well as the four rubber dampeners that’s used to mount the flight controller.

Time to mount the motors to the arms.

The motors come with very long cables which can be hidden inside of the aluminum arms.

The summer mounted.

Motor cables at the frame end of the arms.

One arm done. Pretty nifty to use four main arms that branch of into two. I wonder how well it holds in a crash though.

Arms attached to the frame.

Started soldering the motor cables to the 8XESC board.

Done.

The Mikrokopter Flight controller needs the “raw” PPM stream from the receiver, so I modified a Futaba R606FS.

A pretty simple modification. The signal pin on the “Battery” port was free so all I needed to do was to find the unprocessed PPM stream and solder a cable.

I placed the receiver underneath the flight controller.

Test fitting.

The remaining cables such as the buzzer, PPM cable, power and IC2 bus cables soldered onto the flight controller.

Electronics in place.

The USB programing interface also needs a bit of work.

Done.

These adaptors are for mounting the pops to the motors.

Pretty nifty, but you can only use props with a hex fitting on the bottom.

The landing gear screwed in place.

The landing gear is plenty tall.

Tada! Now it’s time to figure out the software bit.

Woho! Figured out the software and got it programmed. I also balanced the props.

I was disappointed with the quality of the supplied props. The hubs are off center and the plastic feels weak. My APC props feels a lot better with only a small weight penalty.

It flies! Wow, this thing is stable. It was quite nervous in the ground effect but once out of it, it’s super stable.

The Octo weighs without a battery 1197grams. I flew it on one 3s2200 Lipo and I think it was a bit light. I think it will be even more stable with some more weight on it.
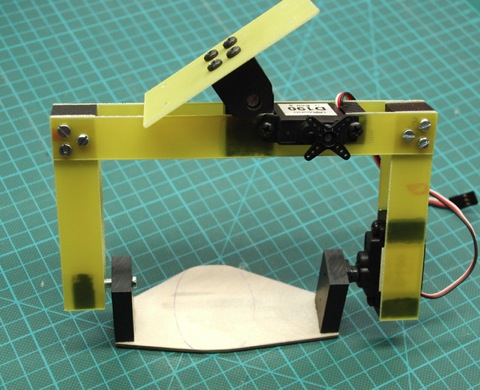
One cool feature the MK board offer is camera stabilization. But to use it you need a camera gimbal, so I built my own.

Tilt servo mounted on one of the arms.
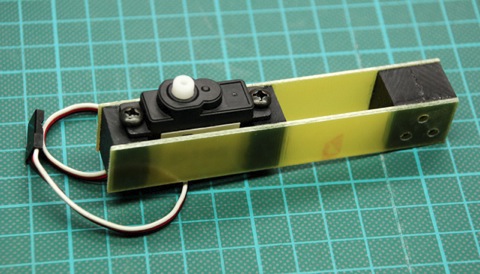
The arms are made from 1.5mm glass fiber and plastic.

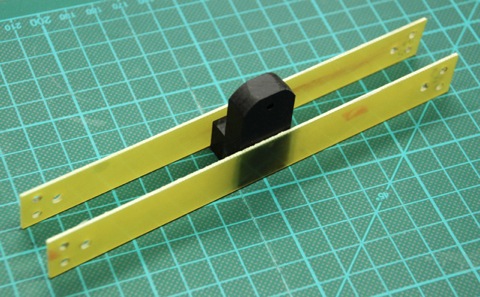
The other arm. Ball bearings to make the tilt smooth.

The top mounting plate with the roll mounting.
The top piece that holds the arms.

Tilt cradle. Made from 3mm plywood and plastic.

GoPro test mounted.
Assembled.
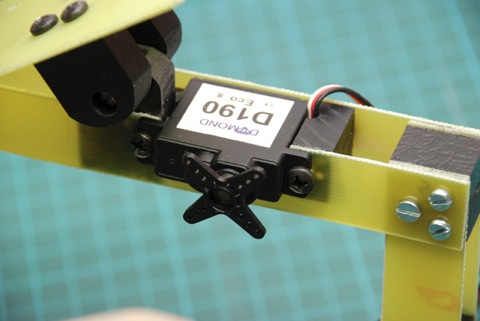
Roll servo mounted.
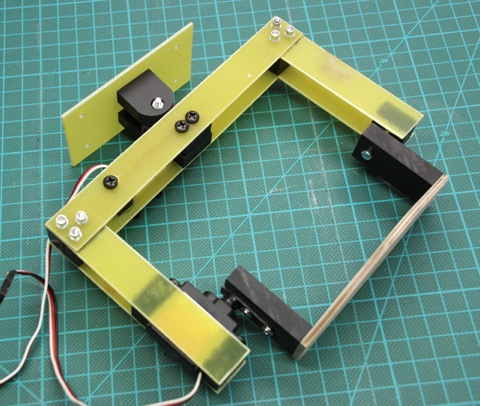
The two axis camera gimbal soon ready for testing.
I’m sorry to have to say that I didn’t have time to take any more pictures or videos before I delivered the Octo.
However I did get to fly it quite a few times before I had to give it to it’s rightful owner. It does fly well once you got it trimmed out. The MK manual (wiki) is one of the most confusing and incomplete manuals I’ve had to read. But after searching various forums for the missing information I slowly got an understanding for PID tuning and ironed out the quirks of the MK flight controller setup. I was expecting a bit more for such a hefty price tag.
Once I figured everything out and fiddled around with the PID values for a couple of flights it actually flies really good. The auto leveling is really good. Wind performance is good. It feels solid and precise. However I would never buy one for my self. The price tag is simply too high for what you get. The KK platform goes a long way and there are other high performance flight controllers that are considerable cheaper (like the Open pilot, or arducopter)
I hope the MK octo likes it new life in sunny California.
Leave a Reply
You must be logged in to post a comment.