
Ever since building the Tricopter V1 I’ve always tried to find ways to improve the construction. I always try new props, motors, esc’s, arm lengths, tail mechanism and such. Often I change stuff before each flight. Always in the quest to find the optimum setup for me.
The Tricopter V2.5 is more of an alternative to the V2 than something completely new. It uses different motors, speed controllers and tail assembly. There are also some minor changes to make the build a little easier and a little more crash resistant.
There is a new theme to the build: zip-ties. I love zip-ties. They make the build quick and easy. They break in a crash absorbing energy. These weak points are the key to the crash survivability of the tricopter. Rather than replacing a motor axel that has been bent, you simply replace a broken zip-tie. This can easily be done in the field as well.
Enough talk, let’s build.
Specifications:
Motors: DT750 750kV Motors
ESC’s: TURNIGY Plush 18amp Speed Controllers
Battery: 3s Turnigy 25-35C 2200mAh LiPo
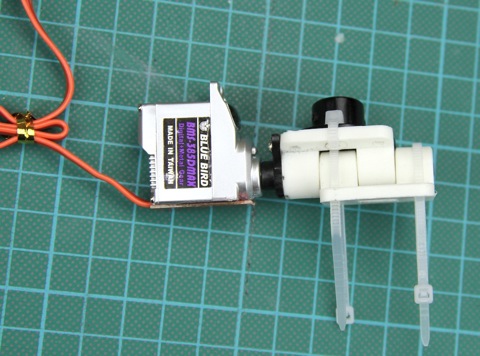
Servo: BMS-385DMAX Digital Servo (Metal Gear)
Props: GWS 10*4.7 or GWS 11*4.7 for heavy lifting
Arm length: ~50cm (center to motoraxel)
All up weight: 860 grams (Including battery) (670 g without)
Amps during hover: ~10A
Motor test: [email protected] – 7770RPM – 1080 grams thrust / motor

I still like the V1 template and a friend of mine was nice enough to cut a few for me on his CNC machine for me.
Due to popular demand I now offer pre-cut V1 tricopter frames!

10 M3*16mm screws is needed. I used these hex screws.
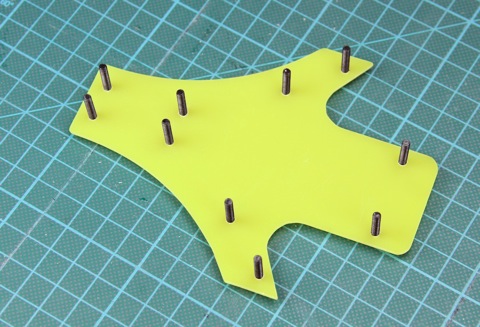

All three arms are the same length. I cut my arms to 48cm. The arms are 10*10mm pinewood.
The holes in the front wooden arms are drilled 25mm from the edge. It’s slightly further in than the template states, but the extra material stiffens the frame a bit and is helps the durability. The little wooden piece in the front is 40mm long and helps stiffen up the frame considerably.

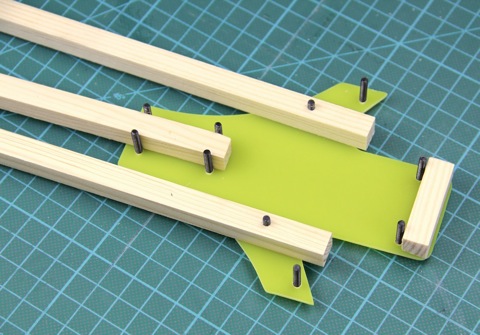
Time to screw the frame together.

I use these m3 lock nuts. Extend the arms fully before tightening. The arms are supposed to touch the screws when fully extended. Be careful not to over-tighten the screws, but they should be tight enough so that they do not move during flight. Now the main frame is done.

Here is a simpler alternative to the V1 templates. I call it the coffin body and it’s easier to make as all the lines are straight.

I made this coffin body slightly larger as the person I’m building it for needs the additional mounting surface.
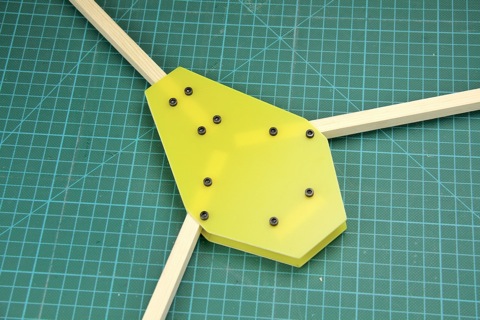
Simply take the V1 template and draw straight lines instead of the curves and you’ll end up with the same shape.

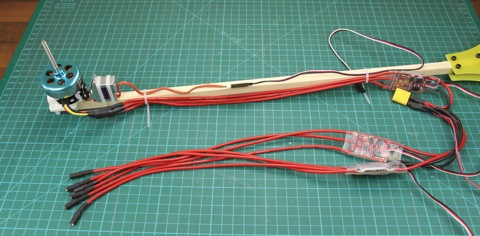
Time to fix the ESC’s.

Off with the heat shrink.
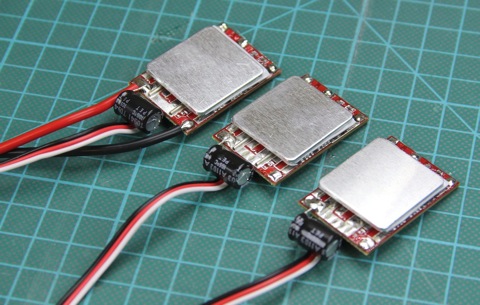
On two of the ESC’s, you should now remove all the cables except for the servo lead. On the third one, you should also keep the battery cables. This ESC will be the one on the tail and it just so happens that the cable is the right length to begin with.

New cables in place. Here are the cable lengths I used:
Back ESC battery cables: Stock (10cm)
Back ESC motor cables: 32cm
Front ESC’s battery cables: 18cm
Front ESC’s motor cables: 28cm
I used this 16AWG silicone cable.
Also soldered on 3.5mm bullet connectors.

New heat shrink. I used this nice transparent heat shrink that is nice and thick which helps protect the electronics. I have stripped the label from the original heat shrink, so that you can still identify the type of ESC’s, but this isn’t really necessary if you don’t want to. Looks nice though.

Time to solder the battery connector. (The thin extra wire is for powering FPV equipment) Here is a tip for soldering multiple cables:
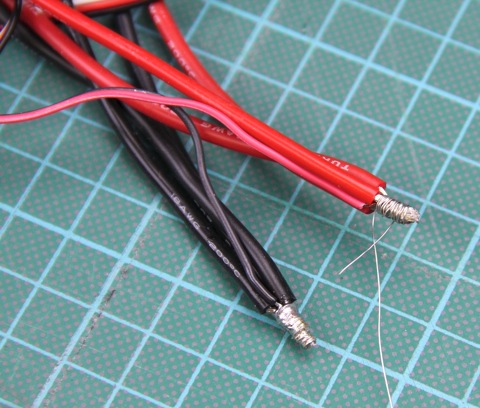
Wrap a strand of wire tight around the exposed end. This holds all the cables in place during the soldering, reduces the size of the solder joint, and it also adds a mechanical bond to the solder joint.

Connector in place.
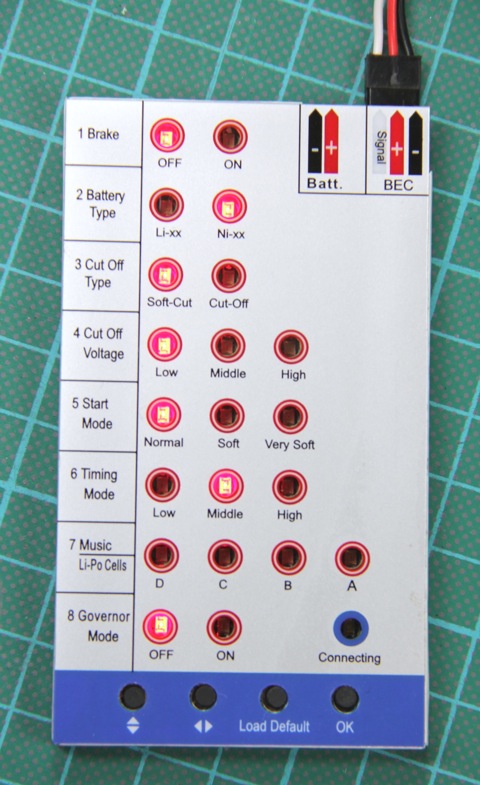
Now to the programming bit. I use this programing card. This is the settings I use on my ESC’s.

Now it’s time to make the new yaw mechanism. This is a bag of 40mm front wheel steering mounts. They are really inexpensive, one bag is enough for 2 and a half yaw mechanisms and costs under $2.5 here.

Take out two pieces.
Start by drilling up the hole to 4.2mm of ONE (just one!) of the two pieces.

Remove any scraps of plastic after drilling the hole.
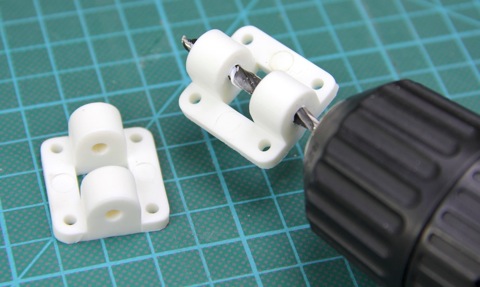
Place the pieces like in the picture and jam a 4mm rod through. It’s a tight fit in the piece that wasn’t drilled out, but that’s what we want. Use some muscles to get it through.
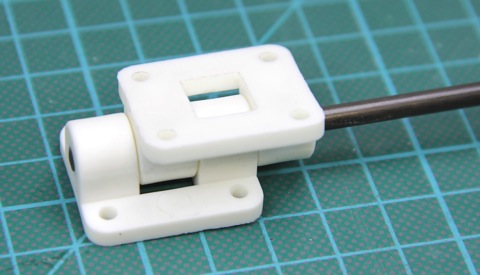
The rod should go all the way through but not poke out at the other end. I used a 4mm solid carbon rod to keep the weight down. The piece that was drilled out should move nice and smooth without any slop at this stage. If it’s not quite smooth, use an exacto knife or similar to wedge in between the two pieces and scrape a little to release pressure. Don’t remove to much though, you want a close fit.

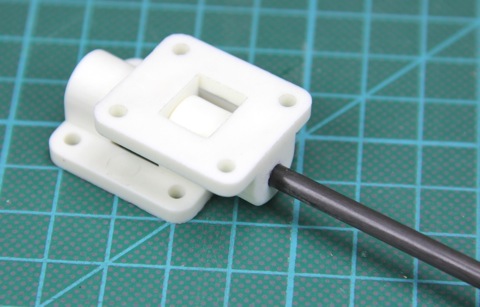
Cut the rod. I used a dremel with a cutting disc.

Done. It should pivot smoothly and without slop.

Sand the edge of the piece where the rod is stationary (the undrilled piece)
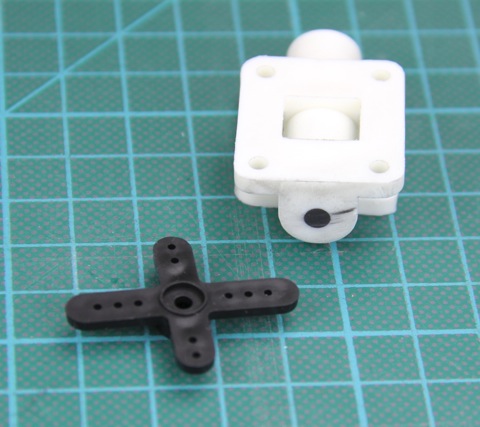
Time to connect the new yaw mechanism to the servo. The servo I use (BMS-385DMAX) comes with a cross shaped servo horn, which is perfect for this.

Sand the horn flat.

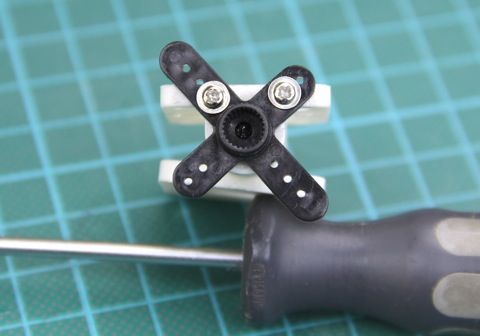
We’re going to drill two holes to fixate the horn, but to get good precision when doing this I recommend glueing the servo horn to the plastic using CA. Two things that is important; The servo horn should be mounted on the piece where the rod is stationary (the undrilled piece) and take great care to glue the horn in the dead center of the rod. If you’re off, there will be unnecessary strain on the servo.

Drill two 1.5mm holes through the innermost holes on the servo horn. Drill as deep or a little deeper than the screw you’re using.

The screws I used came from a HXT900 servo. Nice size and I had tons of them laying around.

Cut off the excess plasic of the servo horn.

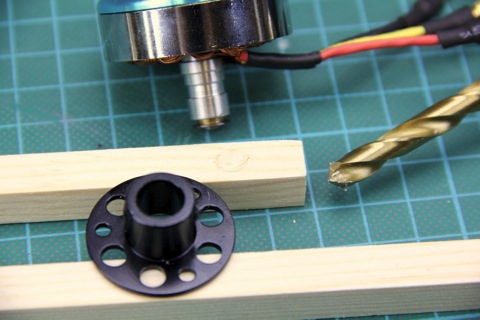
The DT750 motors comes with a mounting base which is the perfect size. You just need to drill one hole in the middle of one side on the piece that has the servo horn attached. To get the most maximum throw I highly recommend drilling the hole on the same side as I did (see picture). This way the zip-tie used to mount the motor base will not limit the travel in the direction that the mount is already leaning to compensate.

Three 2.5mm zip-ties is all that is needed.
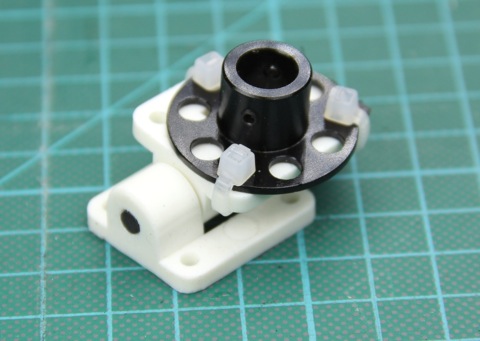
The zip-tie that’s closest in the picture should be mounted just like in the picture, not to limit the travel (That is to say over the short edge).

The servo needs to be modified in order to be mounted properly. Cut off the bottom mounting ear flush to the case.

To get the correct hight I added a 0.8mm thick glass fiber piece to the bottom on the servo. You could just as easily sand down the plastic yaw-mount, if you don’t have anything laying around with the right thickness.

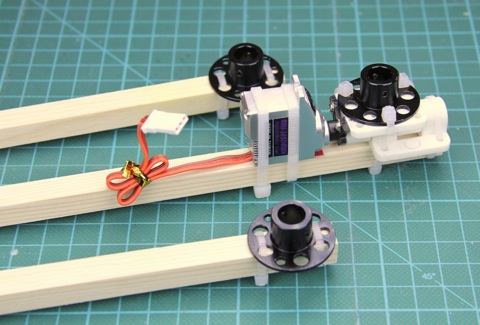
Yaw mechanism done!
Time to mount the yaw mechanism to the arm. Zip-ties for the win!

Mounted on the arm. The servo is mounted with bigger zip-ties.

When mounting stuff with zip-ties it’s a good idea to have the ”knots” in opposite directions if possible. This ensures that the thing you’re securing remains straight. Use a pair of pliers to really tighten all the zip-ties, as this is all that keeps your tricopter parts together.

Started soldering bullet connectors to the DT750 motors. I like the DT750’s. They are pretty efficient. They also have high torque due to their wide bell. This means that the prop will change RPM faster and the platform will be more stable and have a quicker response. I also like the 4mm threaded shaft as you can mount the props straight to the bell without any extra weight or hassle.

A weak point on these motors are where the windings meet the heat shrink. If you wiggle the cables back and forth too much the copper wires will fatigue and break. To fix that and make the motors more durable I added some epoxy.
The motor axel can extend a fraction of a mm out of the bottom of the motor mount base, and to prevent it rubbing against the arm I simply drilled away a tiny bit of wood underneath the mount.

If the motor rubs agains the arm it will draw more current and create more vibrations. Simply drilling a bit of the wood away is a quick and simple solution.

Mount the motor mount using 2.5mm zip-ties. Simple, cheap and fast. It also helps save the motors in a crash.
All the motor mounts mounted.

The axels on the DT750 motors are way to long stock. The risk of an axel getting crooked in a crash increases with the length. I cut mine down to 21mm. This is a good length for a GWS prop and lock nut.

Now it’s time to put the motors in place. Always use thread lock on all screws that goes into metal. Otherwise vibrations will loosen these screws over time.
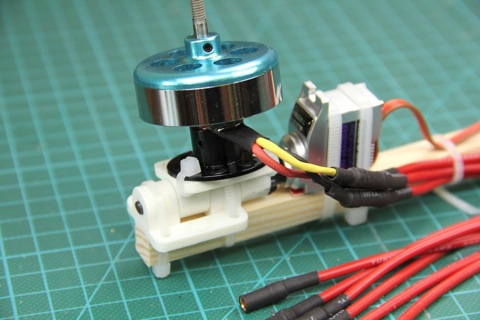
Mount the back motor with the leads pointing 90° out from the arm. This will ensure that the cables won’t rub against the servo.

Landing gear mounted with zip-ties and prop mounted on the motor. The prop needs to be drilled to 4mm. I simply drilled it out with a power drill. Make sure to use lock nuts, otherwise the props will come loose over time. Also make sure not to over tighten the props. The bell can be pushed down to hard and create unnecessary friction agains the bearings.
Test fitting of the rear ESC. I have also mounted the 420mm servo extension.

ESC’s in place.

Tail all done.

This tail mechanism has low friction, little slop, is really sturdy and present very little added drag underneath the prop. The servo is mounted vertically in line with the arm and the tilt mechanism is hardly any larger than the bell of the motor. This means that more of the air the prop moves is used to actually lift the platform. I really like the direct drive servo as well. No slop or extra linkages.

Next it’s time for a revised camera/battery mount. Notice the small slots. The original template can be found here.
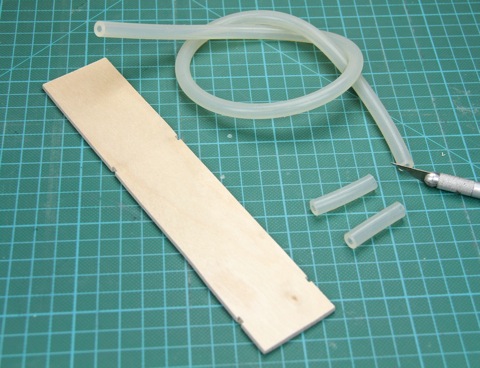
For vibration dampening I used some silicone tubing I had laying around. The dimensions of the tube is 8mm outer diameter and 3mm inner diameter. I cut two 38mm pieces.

I used 2.5mm zip-ties (surprise!) to mount the tubes to the camera mount.

Bottom of the camera mount plate.
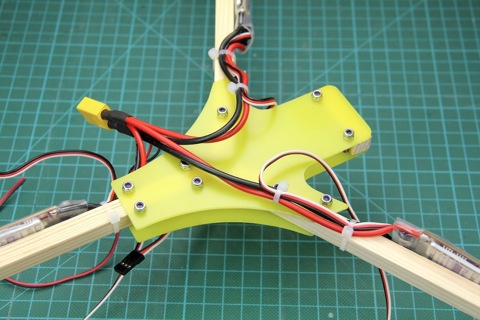
Bottom of the tricopter body.
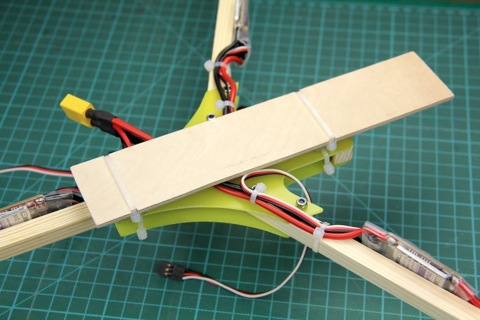
Camera mount fixed to the tricopter body. Another pair of zip-ties, of course.

A more detailed picture of how the zip-ties are wrapped around the body to fasten the camera mount.

This means that the only connection between the body and the camera plate is through the silicone tubing.

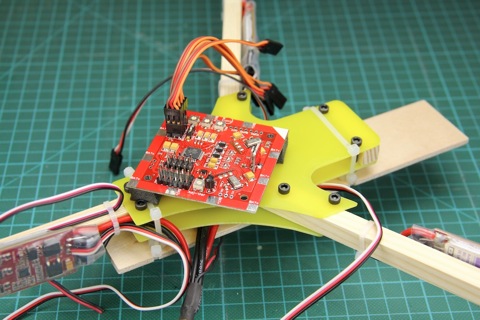
I still love the KK board and I found a really ridiculous cheap one from Singapore for $25! These boards are no longer available with the tricopter V1.6 firmware, the price has also gone up. I now recommend getting this board from Hobbyking. It comes stock with a quad firmware and has to be reflashed with the tricopter V1.6 firmware, follow this guide. Update: I now recommend the KK2 board which doesn’t require to be reflashed, and it performs even better then the old KK boards.To mount the KK board, I use double sided sticky foam tape folded over 6 times and then cut into squares.

Simply peel off both sides and smack onto the KK board and you’re done.
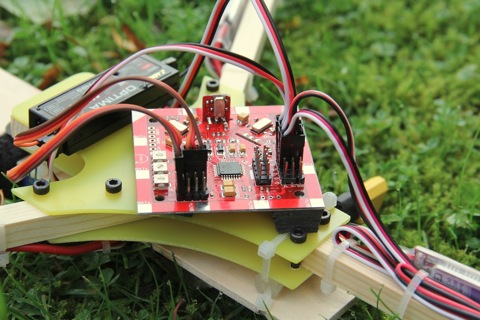
Only needs a receiver and a battery now.
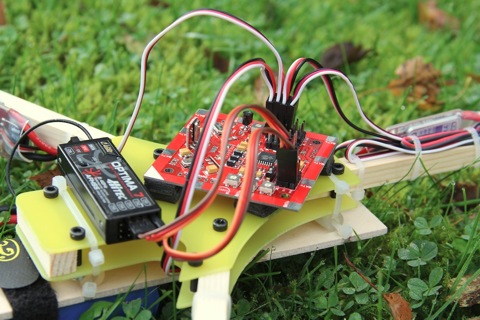
Done!
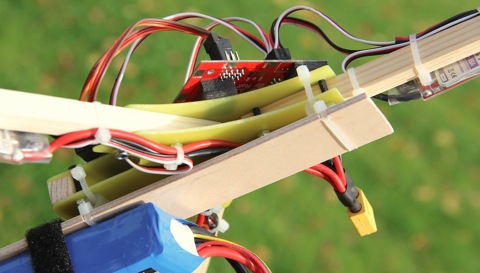

Folds up nicely for transport as well.


The new yaw mechanism works like a charm. I’ve had around 50 flights on it and so far so good. Still no slop and silky smooth.


Battery is held in place with a Scorpion battery strap which is awesome! It’s a little sticky and once it’s tight it won’t move anywhere. It just grabs that battery and holds it in place. Sorry for being so exited over a battery strap, but I’ve been looking for ever for a good battery strap and I finally found it.

Lift off.

One thing it does not lack is power. The DT750 motors are capable of lifting much more than the 2213N motors.

The DT750 motors runs smooth and quiet. Flight time is around 12 minutes with a 3s 2200mAh (without camera mounted).
Here is a video of the Tricopter V2.5 in action:
Shopping list:
1 x KK board Recommend this one instead
3 x DT750 750kV Motors
3 x TURNIGY Plush 18amp Speed Controllers
1 x 3s Turnigy 25-35C 2200mAh LiPo
1 x BMS-385DMAX Digital Servo (Metal Gear)
1 x GWS 10*4.7 or GWS 11*4.7 for heavy lifting
1 x Front wheel steering mounts
1 x Transparent heatshrink
1 x 4mm heatshrink
4 x Red 16AWG silicone cable
1 x Black 16AWG silicone cable
4 x Male to male servo cables
1 x M3 Hex screws.
1 x M3 lock nuts
1 x M4 lock nuts
1 x XT60 connector
1 x Battery strap
1 x 420mm servo extension
1 x 3.5 bullet connectors
1 x Programming card
3 x 1.5mm glass fiber plates (min size 140*100mm)
(Due to popular demand I now offer pre-cut V1 tricopter frames!)
4 mm carbon fiber rod
40+ of 2.5mm zip-ties
3 mm thick plywood
8 mm silicone tubing
Blue locktite
CA glue
(Items without a link I’ve bought at local shops)

Congratulations as always, that is to say a fantastic project!, I built the same as what you built, card KK, initially did not want to fly balanced, but after many, many attempts I succeeded! Was the FIRMWARE the card you want to force version 1.5!. Very stable in flight, I made a bad fall with the ticopter, but due to its type of construction has not broken anything!. I have to put some lights or hood, to realize the front and back of the tricopter.
Thanks, keep it up.
Try the KapteinKUK V1.6 firmware. It’s even better 🙂 Glad you got it working. Isn’t it awesome to build something from sticks and glue and have it fly so good? 😀
Heter den faktisk kaptein kuk!?
translation: is the board really called captain cock!?
Sure is really amazing, now I feel with FIRMWARE 1.6, so you can see how goes.
I recommend to you I’m waiting for your project earth station for FPV.
Hey David!
I really want to build your v2.5 tricopter but I’m unsure about which receiver and transmitter I should get.
Could you personally recommend one?
Thanking you in advance 🙂
how to connect the servos cable to the receiver?
@tsiptom:
You do not connect the tail servo directly to the receiver at all. The kk-board gives the steering signals according to the sensors and to your steering commands from your transmitter. Therefore the servo as well as all the motor esc’s get connected to the kk-board. Just follow David’s set up guide:
http://rcexplorer.se/educational/2011/02/kk-tricopter-setup-guide/
The tail servo gets connected to the M4 port of the kk-board.
Ogre
ok thank’s!!
Please let me know – What is a programing card for? How it works? I’d like to assemble Tricopter V2.5, but not sure if i need to purchase a programing card. Thank you, David
Hey, this is a great build, love all the photos here. Mine is all built, but it needs some trimming, a lot actually. Right forward motor spins a lot faster and tips the whole thing to the left. Maks trim on the 9x doesn’t help. I found the soldering very cumbersome, so the RF esc is actually the only soldered; the other two connected with these joints with screws (SUKKERBITER). I flashed the board with V2.6 i think, not the famous 1.6 kaptein kuk, but should that matter?
Could it my 9x turnigy transmitter? I only set it on heli 2 (90°). I’ve calibrated the throttle and all the motors starts simutaniously, that is calibtating all the escs at once.
I don’t know, is the gyro reversed? Any tips?
Thanks,
K-man
Hardly it has any sense now, but you should have calibrated the ESC throttle range 🙂
@kazansergei:
The programming card is used to set up the parameters of your esc’s. You can teach the esc what kind of battery you are using (lipo or NihM), at which voltage of the battery you want the esc to stop the motors to prevent the battery from being discharged too low and thus getting damaged and you teach the esc how to start and stop the motors (hard or soft start). You can set these parameters without the programming card by using your transmitter but it is a little tricky. You do not get any optical information on which parameter is set and which parameter you are setting at the moment. The esc tells you this by beeping sounds. So you have to count the number of beebs or the pattern in which they are emitted. You control the setup of the parameters with the throttle stick of your transmitter. With the programming card you have buttons for switching and entering commands and led’s which show all the information you need while setting the esc parameters. With the card the setting up the esc takes 30 s or less. I for myself would not want to go back to programming the esc without a programming card.
Again, you do not need the programming card if you are ok with the more tricky programming by the use of your transmitter but I would recommend getting the card as it really makes your life easier.
Hope this answered your question
LeOgre
Just finished the 2.5 tri-copter, flashed the KK board to V1.6, purchased a DX6I with reciever, can not get motors to run however KK board LED comes on. Any ideas? have “re-binded” the reciever. I feal I am over looking something simple. Everything is plugged in, but KK board plugs are not “polorized”, could the plugs be backwards? Not even the servo moves. Thanks.
Does the LED come on when arming the board? You move the throttle stick down to the bottom and then to the right for arming the board. If it does, then the connection between the receiver and the transmitter is working properly.
Do the esc’s beep when connecting the battery to the tricopter? With my tricopter the esc’s beep, the motors give a slight twitch and the servo moves just a little bit when connecting the battery. I guess you put the plugs for the esc’s and the servo backwards. Just look at David’s set up guide. On your servo and esc’s you will have a white, red and black or brown wire. White is signal this one has to point away from the outer edge of the board, red is + it goes into the middle and black or brown is ground or minus and this goes to the outside of the board. With the connectors from the receiver to the kk-board it is the same: black or brown (minus) always points to the outside of the board.
Good luck
Ogre
I hope to have my parts from Hobby King this weekend and start to build my Tri. Forgive the total noob question here but in reading and looking at the build pictures, I can’t see where the servo leads from the battery go. Is there a wiring diagram for the tri-copter anywhere. Again, forgive my noobness.
RT(F)M! 😉 or in this case: http://rcexplorer.se/educational/2011/02/kk-tricopter-setup-guide/
As former Army,RTFM is a really good answer….except in this case.
Having never operated any RC vehicle, let alone build one, I have efforted to familiarize myself with the basic functions and installations of the components, this includes reading the set up guide (aka TFM) a couple times, but I’m still confused about the battery servo cable which I don’t specifically mentioned. Battery power cables are obvious, as well as all the other ESC, motor and servo cables.
Again, forgive my ignorance but my neophyte understanding of this basic cable is escaping me.
Thanks for your help.
That’s why I put the F in brackets. I did not want to sound too harsh, I just wanted to aim you to David’s set up guide as I thought it would answer your question. I remember perfectly when I did my first steps with RC-models. So, sorry for me being kinda jerkish.
I am a bit confused now, what cable do you mean with battery servo cable? The servo cable gets plugged into the kk-board. There is no other cable connected to the servo. Do you mean the small cable that is coming out of the battery? This one is used during charging to balance the cells and for monitoring the battery during flight if you attach a LIPO-guard or something like that to it. Maybe I just misinterpreted what you wrote.
LeOgre
Not jerkish at all man…just funny. I think the problem is that with my inexperience…. this is so simple that I ‘m making it harder. I see 2 sets os cables coming from the battery. One set are black and red power ca les. It’s the other set I was questioning. They are like servo leads.
From your response it looks like they are used to re-charge the battery. Sorry for all the confusion.
Nice, so we have this sorted out. Just to be on the safe side: Are you using a charger that is suitable for Lipo’s to charge your battery? If you are new to the RC-stuff you might not know that you can’t use a charger for NICM and NIHM batterys for lipos. You need a charger that has a connector for the balancing plug of your battery (that is the smaller cable we talked about). The main charging current flows through the power wires of the battery but the balancer cables tell the charger the voltage level of each cell (3S means there are 3 cells in the battery). If one cell has a different voltage from the others it gets a little more or less charging current to get equal to the other cells. That is one reason why you have to use a lipo charger for lipos. The second reason is that lipos need another method of determining the end of the charging.
If you are not familiar with the use of lipo batteries you might want to do a little reading on how to operate, charge and store them in a safe way as lipos can – given the right circumstances – catch fire. And you do not want that to happen when they are on top of your workbench with a lot of flammable stuff around them.
LeOgre…Yep, the ESC’s and the servo were plugged into the KK board backwards, I reversed the plugs but I think the damage is already done. The board will not unlock now. I have re-flashed the board and will try it one more time, if unsuccessfull its the new KK board for me. But why does the servo go full left(or right)? Bad noises are heard when it does that.
Randy,
hmm, it would surprise me if the board got damaged by the plugs being backwards. Do you use the tool recommended by David for flashing the kk-board? If the tool tells you that the flashing was successful, than the processer on the board is fine because it has to report back the code it got flashed to the flash tool for comparison. The processor is the most damageable part of the board. If he survived I guess the other parts are fine as well.
I had some problems with arming the board for the first time as well. I had to reverse both throttle and rudder on my transmitter for it to work. Instead of this you can also try to move the stick full up and then to the left and the right. If the cannels are reversed you can’t arm the board with bottom and then to the right. It might be bottom left or top left or top right. If you can’t arm the board with holding the stick for a few seconds in all of this for positions we have to look further.
Good luck
LeOgre
LeOrgre,
That did it, the board is unlocking now that I reversed the rudder. Thank you. The motors are now working. I have not yet plugged in the rear servo now that the locking issue is resolved, what about it going full left/right when plugged in? It makes a bad noise when this happens, like it wants to go further. Seems like it should be in the neutral position. Again thank you! Randy
Hi Randy,
nice, your board is still alive! In regard to the servo: is it possible that you assembled the tail mechanism when the servo was not in its neutral position? In that case, now, when the board switches on, it tries to move the servo to its neutral position but that is not possible as the tail mechanism is preventing in from moving there. This would explain the sounds, when the servo is straining against the tilting mechanism that is blocking its way.
Just undo the zip ties holding the servo, slide the servo back so the servo horn gets free and then switch on the servo. It will move to its neutral position (check if you have the travel adjustment on your transmitter on neutral as well) and then you can reattach the servo horn (with the tail mechanism leveled out – the back propeller in neutral) and put new zip ties on the servo.
Good luck
LeOgre
P.S.: You can reply to my post with the button “reply” under my name directly in my post. In this way it is easier to see, that you are referring to my post for new readers.
Nvm the last few words that I wrote, I used the wrong reply myself.
LeOgre, with the rear servo now plugged in, it is reacting very sluggishly to stick input, and returns to neutral VERY S-L-O-W-L-Y. Still makes noise when in the neutral position. Ideas? The motors all start at slightly different throttle positions, is this why all the videos show the TRI’s jetting off the ground to start? Thank you again for not only helping me but helping other first time TRI builders thru this posting. Oh, I do have a Lipo charger for my batts, thanks!
Randy,
the noise the servo is making, is it the normal noise of a servo wanting to hold position with some force against its horn trying to move it away from its position? In neutral my servo appears to not make any noise. But the motors have to be turning for testing it so the propellers could cover small amounts of noise from my servo.
I just uploaded a short clip of my tail servo moving left and right and then moving back to neutral by itself for comparison for you.
http://www.youtube.com/watch?v=2Ajvw1e35Nc&feature=youtu.be
In the video you can see that the servo after being bend to the right moves fast to 10° or 15 ° before neutral and then very slowly reaches full neutral. That is because of the sensors not getting clean data due to vibrations while being on the ground. In the air it behaves well so I guess this slow movement on the ground is not something that needs to be fixed.
You could try to disconnect the servo from the tilt mechanism to see if it still makes noise when in neutral. Oh, what kind of servo are you using? Is it one with similar specs to the one used by David?
Have you tried increasing the yaw gain?
Maybe you could upload a clip of your tail servo as well, at the moment I do not have a really good idea of what could be wrong.
The different starting point of the motors is quite common. You have small differences in your motors and esc’s so they can’t start 100 % at the same throttle. Later on in the air each motor is controlled separately so the small differences are leveled out.
LeOgre
LeOgre, It’s alive! I have watched your vid (thank you) and your servo behaves like mine, so I am going to procede with the motor and prop balancing. As this is my first real TX (DX6I) I am sure more ??? will arise. FYI, all my parts were purchased from HK, I just went down David’s list and ordered them all. I am going to mount the rear motor on slightly slanted to give the servo more of an equal throw to both sides and also see if I can give David’s mounting bracket more throw too. You have been very helpful, my frustration level is now much more on an even keel. I’ll keep in touch.
Hi Randy,
glad to be of help. Have fun building and flying!
Ogre
Here’s some pictures of mine.
http://mxclouti.dphoto.com/#/album/1ed88m
Very cool! Alas, my parts didn’t arrive this week as I had hoped but when they do I hope to get something built as nice as that, nice job.
Randy, been following your posts. Thanks you guys for all the back and forth info, helps us new guys when the time comes to trouble shoot. Please post some pictures or video when you get it going Randy, can’t wait to see it.
Opps! that reply was to Mxclouti, mine will look much more “utilitarian” I’m sure.
Looks very nice! Nicely built too, I see good quality motor mounts.
I really want to build the v2.5 tricopter but I’m unsure about which receiver and transmitter I should get.
Can anyone recommend a starter version from Hobby King?
Yokimoto,
I do not have any transmitters and receivers from HK so I can’t recommend one. I am using a Spektrum Dx6i and I am very happy with it.
You need to find out which frequency is allowed for radio controlled air models in your country but I guess 2,4 GHz is all right. I would not use a 35 MHz or 40 MHz system as there are not so many different channels and you always have to make sure no one around you is sending at your channel. The 2.4 GHz stuff is sending with a code so your receiver listens only to your transmitter even when he is able to “hear” a lot of other transmitters on 2,4 GHz. This makes your life a lot easier and safer.
You need a system with at least 4 channels; for throttle, rudder, elevator and aileron.
I hope this helps a little
LeOgre
Hi David,
Is there a wiring diagram available for the tri-copter V 2.5? I saw one with the V1 version but couldn’t find one on the plans for the V 2.5 which I’m starting on now. I need some help on the motor and esc connections etc.
There isn’t a complete wiring diagram but all the necessary information are given by David in the building log and in the set up guide.
The guide tells you how to connect the receiver, the servo and the esc’s to the kk-board:
http://rcexplorer.se/educational/2011/02/kk-tricopter-setup-guide/
As for the power wiring, look at these pics:
http://rcexplorer.se/wp-content/uploads/2012/09/tricopter71.jpg
http://rcexplorer.se/wp-content/uploads/2012/09/tricopter91.jpg
You solder the minus cables of all esc’s together and the same with the 3 plus cables. Then you attach the battery connector to the minus and the plus bundle. I mean, how else will you get power to all 3 esc’s at once? 😉
Then you attach one motor to each esc’s using 3 cables. If you need to change the turning direction of a motor just interchange two of the 3 cables and your done.
Ogre
P.S. Take your time reading the build log, David gives very thorough information there on every detail of the build.
I’ve recently completed a successful v2.5 build, and shared a bunch of things I learned along the way in a blog post here: http://ccrawford.blogspot.com/2012_11_18_archive.html
David’s work and build log here is excellent (thank you!), however as a rookie pilot I needed extra strength and protection in a few places.
If you’re just starting out, take a look. Some of what worked for me might work for you too.
I have finished and flown my tri! My advice on that first flight is be very certain that the motors are all turning the approximate same speed before lifting off, I trimmed the TX sticks with the motors turning slowly untill they were close in speed and the first flight was without dissaster! Good luck y’all! Thanks to LeOgre and all you posters that help the rest of us.
Awesome man congrats! Thanks for the tips. Any chance you can get a picture up?
Pictures should be here at http//randy1002.dphoto.com (I hope) untill Dec.30 anyway. I milled the 1/2 arms to 10mm on a small table saw, bought the plywood at a local craft shop, and painted them and the rear prop. Changed the landing gear to pvc rings since these pics and will add some sort of “nose” soon. Gotta learn to hover it over one spot for the entire battery life first!
Yes a big thanks to LeOgre! It’s people like him that makes this hobby grow 🙂
The recommended KK2 board is on sale right now! http://www.hobbyking.com/hobbyking/store/uh_viewitem.asp?idproduct=24723 I am still waiting for my electronics but have built the Frame using Birch ply and Pine for the arms. David, Thank you so much for the detailed build. I hope That all your future endeavors yield great reward!
Yup. Got that email yesterday from HK and bought a KK2 board as well! I’m in the same boat you are and waiting on my parts (This week?)
Lipo batts cannot be shipped by air, therefore any order that includeds a battery will come to the US by boat, a long trip time wise. Backordered parts arrive later also. I have recieved orders in nine days if no batts or backordered parts are on it. (California)Just a tip!
Hi everybody,
Due to David’s incredible success :-), a lot of stuff listed over here are out of stock on HobbyKing. I don’t really want to wait for the refill because I want to build my tricopter on December the 25th (guess why). I am not familiar with this kind of hardware so I don’t know well what can I do… Either I buy similar equipment, or I buy them on another website. That’s why I need your knowledge and experience!
Here are my questions :
– DT750 motors :
http://www.hobbyking.com/hobbyking/store/uh_viewitem.asp?idproduct=6247&aff=61689
What about DT700? Are they really different? As a beginner, am I going to see the difference?
– Props :
http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=10055&aff=61689
Should I take GWS 11*47 instead of 10*47? I don’t want to have too big props. How would you replace GWS 10*47?
– Front wheel steering mounts. Instead of 40mm, 32mm are available :
http://www.hobbyking.com/hobbyking/store/__8431__Front_Wheel_Steering_Arm_Mount_Set_32mm_5sets_.html
Are they OK for this tricopter? Is it going to fit?
– Turnigy BESC Programming card.
http://www.hobbyking.com/hobbyking/store/uh_viewitem.asp?idproduct=2169&aff=61689
It is not available anymore, and I couldn’t find any other programming card compatible with Turnigy Plush! I know I can get rid of a programming card but I also know this is tricky, so I suppose I have to buy this particular card elsewhere?
– And finally, are male to male servo cables easy to find in local shops? On HobbyKing I was only able to find male/female cables, whatever the size… What do you think?
Thank you for your help!
Vince
yeah a lot of stuff is out of stock right now unfortunately. I ordered the 700. they will be plenty strong enough to fly this baby. Your LHS should have the props and you can find them all over the internet. I’ve read mixed reviews about having the front props counter rotating but as I understand since you have complete Yaw control you shouldn’t have a worry for it so you can buy a bunch of standard 10×4.5 . There are other options to make a rear Yaw control. such as this: http://www.youtube.com/watch?v=U0BmoAk6VQo Once you wrap your head around it and understand what needs to happen you will make it work! David has just made a very nice looking and effective control unit. I personnaly bought the Mystery 20A esc’s since the HK Blue esc card is cheap and in stock. ESC’s http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=9484 CARD for programming which of course is out of stock right now but is usually in stock: http://www.hobbyking.com/hobbyking/store/__13431__HobbyKing_Programming_card_for_BlueSeries_Brushless_Speed_Controller.html You can setup HK to email you when certain items come in stock at the bottom of the page. Also look uner the Mulicopter tab on the HK site for everything related to multi s heres a link to the male to male http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=21758 yep out of stock but I ordered some on the 27th so everything comes and goes. these should be in stock at other online and Local shops. Good luck.
Marc
Hey all,
I am new to Multicopter building, and wanted to try this out. Ordered already couple of needed items and just waiting them to arrive so I can start.
Now to my question: How is the tail arm fixed? As the front left and right arm have a adrilled hole and a screw which is fixing them but the tail arm is just placed there and has only the four screws at the side of it.
Thanks in advanced!
Kismet
It is secured by the pressure of the frame and like you said in between the 4 bolts. In making my frame and arms I actually had to shave a bit off that rear arm to get it in between the bolts. It seems very secure. Note: I do not yet have a flying tricopter.
It will make sense once you start putting it together. The tail boom is just pressure fit between the plates and the four screws. It does not move. the front two arms pivot on one screw and the other keeps them from moving too far forward. On mine, i find a rough landing may knock the arms back. Saves the arms, but means that I need to double check them after bad landings.
Thanks to both of you. I just wait for my parts to arrive.. moste of them are already there but will see.. Thanks again
I’m a noob so what channel do you use on this?
What do you mean? What kind of a transmitter or rc equipment? Or do you mean the legal frequencies for flying a radio controlled plane/heli/multicopter?
vraiment un exelent projet (comme d’habitude!)
bravo!
quel type de recepteur conseillerez vous pour ce tricoptere? 50mhz?
je sait qu’a vos yeux de profesionnel cette question peut paraitre bête mais voila.
j’ai 13 ans et avec l’aide de mes professeurs de technologie de mon college, nous allons construire ce tricoptere.
alors voila.
faut il mettre des gyroscopes sur ce tricoptere?
si oui comment?
merci d’avence!
Hi, would you mind trying to ask your question in English? I don’t know how many French speaking users are here but I for myself do not speak a single word in French even if I have a French nick name.
LeOgre
anonymel wrote :
I know my question could sound stupid to experts like you but here it is :
I am 13 years old and I intend to build this tricopter with my teachers at school.
Do we need to put gyros on this tricopter? If so, how?
Thanks !
————————-
Salut,
Non tu nes pas le seul francais ici, par contre tu es le premier à poser une question dans cette langue 🙂
Si je ne dis pas de bétises, ce tricoptere a des gyroscopes ET des accélérometres dans la fameuse carte “KK2”. Donc pas besoin d’en rajouter.
Je suis moi meme en passe de monter ce tricoptere mais je n’ai pas encore recu les pieces. Donc prends ce que je te dis avec des pincettes. Je pense quil faut attendre une réponse des autres…!
I wrote :
Hi !
I am not sure of what I am saying because I intend to build this tricopter too but didn’t get everything from HK yet.
I think there are gyros AND accelerometers on the KK2.0 card. So you don’t need to put additionnal gyros by yourself. But we should wait for someone else’s answer because I am not sure!
See you guys
Ah, thank you for the translation! Your answer was 100 % correct. The gyros and the acceleration sensors are already on the kk board.
LeOgre
merci beaucoup pour ta traduction, et ta réponse!
ça fait vraiment plaisir de voir l’ambiance d’entraide qui règne ici!
saurait tu également quel type d’émetteur/récepteur fait il mettre sur ce tricoptere?
merci encore!
hi leOgre
thanks for your confirmation
would you know the type of transmitter/receiver I could use for this tricopter?
thank you very much for helping peoples like me! on this website
Anonymel, There are many TX-RX that will work. You can go for a budget radio like a Ternigey/Flysky 9X type for around $ 70.00 US up to a Spectrum DX for a bit more or a Futaba for a more expensive but quality radio. Search the net and different forums for reviews, and the andvantages and disadvantages of each. There are options for all levels of experience and budgets.
If you intend to make r/c a serious hobby, your radio will be your most important investment. There are plenty on the market already. Specktrum and futaba seem to be the most common. If you plan to have multiple aircraft then a computer radio with multiple model memory is what you are looking for. You will also be able to set pitch and throttle curves and mixing to fine tune your flying experience. Some model can do this via a computer hookup. I personally use a Spektrum DX7 which has 20 model memory and can fly helicopters and planes which any new models can do. RX’s are only a few bucks for off market and $30+ for name brand. I’ve used both and have never had a problem. Hope this helps,
Marc
Got my frame built (again) and started working on the ESC’s. Here’s the deal, putting the soldering iron on the existing cable heated up the ESC pretty good without actually melting and loosening the solder on the wire. The back, silver protective cover came off from the ESC from the heat so I stopped.
I don’t want the ESC to get too hot trying to get these wires off. Can I just add length to the exisiting cable? Am I going about removing these wires the wrong way by applying the iron to the end of the soldered cable?
Any input would be appreciated.
Hi coda vex
I encountered the same problem when I removed the cables from my ESCs. You lose far too much heat into the cable which is acting like a heat sink. So I cut off as much as possible off the cable. So I only had to heat the small blob of tin solder with a few mm of copper strands from the cable on the ESC. In this way the tin solder got liquid pretty quickly without heating the ESC too much.
I hope this helps
LeOgre
P.S.: If it does not work, use a blow torch. (Just kidding)
The silver cover is a heat sink. It does come off fairly easily. The wire and pads are pretty big, so you’ll want to use a fairly high setting and a broad tip on your soldering iron. Make sure you clean and re-wet the tip with fresh solder for best heat transfer before you start, and make sure you tin the ends of the replacement wire.
I was afraid to un-solder the wires, so I just extended them. Not as pretty but it works. I then shrink wrapped the new soldered connections.
finished mine the other day but had to wait till today for a break in the weather. It flies great with 10×4.5 props I might try 11x next. This is my 1st multi heli and I’m glad I built it! I have also read of people complaining of the arms folding in. I simply made a pin to go into the arm to hold it in forward position. The KK2 board is super easy to use and anything you want to know is only a search away. Hers a link to my RCG Blog for pics on my build. http://www.rcgroups.com/forums/showthread.php?t=1792815#post23583589
I used 1/8 Hobby Ply and 5/8″ Pine. needless to say super sturdy!
Hi everyone. David, like everyone said, this is a fantastic walk through of the build. I have been wanting to build a tricopter for some time but have been intimidated because I could not find a good walk through with a full parts list. This will be my first build. Can you give a rough ballpark total cost for tricopter parts, controller, battery, charger, etc. I just want to know what kind of money i need to start setting aside to go from absolutley nothing to flying. Thanks everyone!
I’ve posted my HobbyKing order details as a blog post here: http://ccrawford.blogspot.com/2012/12/tricopter-what-does-it-cost.html
I started from nearly scratch (had hand and electronics tools) and probably have spent $800 or so over the past few months. Not all those purchases were necessary, but you’ll probably need to spend at least $450 to get get going “from scratch”.
Hmm. That permalink isn’t working, but this one should: http://ccrawford.blogspot.com/2012_12_16_archive.html#1312608566925749680
Or just go to the blog root at http://ccrawford.blogspot.com and follow the link in the right hand column. Sorry for the clutter.
Electronics will run about $100. Depending on radio you buy anywhere from $50-$200 or more! If you plan on staying with Rc as a serious hobby take your time and research your Tx (radio). It will be one if not the most important investment for your hobby. Board $20-$30. Escs $30 for 3. Motors $10 each. servo for tail $20 . Wire should be around 12′ @$1+ per foot. bullet plugs are $2? That’s the bigger stuff. But that’s s short breakdown. There is shipping costs too if you can’t sourse locally. It will be a modest investment to start but remember that you can reuse most electronics after a crash! Best of luck
Marc
I bought the original KK board linked in here when i built mine from this guide. I just recently finished it (a year later lol)
I have a major issue with it, every-time I start the throttle the Tail servo turns in one direction slowly until it travels as far as it can go. Cutting the throttle makes it snap back in place, as does giving rudder input.
The rudder also doesn’t center quite right, but it appears to be the flight controller that’s giving that instruction as it has no issue when directly connected to the RX.
I think maybe the channels are mixed up somewhere in the software settings. I bought the LCD screen for the KK Plus, but there’s no manual i can find lol
Can anyone help me out in figuring this out?
Hi I hope you have found the answer to your servo question. I have used an analog servo which did the same thing. I now have a larger servo since I stripped the Bluebird servo and the analog didnt work. Now that the new Digital servo is on the thing spins erratically when I spool it up! I found that by reversing the servo on the KK2 it solves the problem.
Ok, here’s how you reverse the servo on your tricopter:
Go to the Mixer Editor
Change to Channel 4
Set Rudder from +100 to -100 (or vice versa)
Done. Happy New Year!
Marc
I think that’s probably the issue. I’m using the 1.5 firmware.
Unfortunately my Spektrum DX7 TX doesn’t support 2 servo 90 degrees, so I’ve been flying (or just trying to set up)in airplane mode.
If i can use some other helicopter setting I could fix it, but I’m not really sure if I can use any of the other swash plate modes.
Here is my Super Simple Gimbal for the tricopter:
http://www.rcgroups.com/forums/showthread.php?t=1793759
Discount code for Servo!
http://www.hobbyking.com/buddy.asp?code=F8309D27-1B7C-4553-8935-E982692A1432
Hey,
I build my tricopter but I am confuesd to what values I have to set the KK 2.0 Board. Especially the P-Gain, I-Gain, etc.
Appriciate every hint and/or help.
Mine sits solid as I have these settings. If you want to raise or lower stick sensitivity it under Stick Scaling
PI editor: Aile & Pitch
P gain 70
P Limit 100
I gain 10
I limit 20
Rudder
P Gain 50
P Limit 20
I Gain 0
I Limit 10
That should get you started Good Luck
Marc
Also check this link as a great tool to using and understanding this Board:
http://www.rcgroups.com/forums/showthread.php?t=1675613&highlight=kk2
Thank you for the information. I set all up and it kind of worked… But still some problems… when it lifts off it spins.
One more think I noticed is, when the props are not mounted and the motors are running, and I hold the copter in my hand, and spin the tail to the left the yaw turns to the left as well! I thought It should try to stabilze it and turn to the other direction?!?!
i guess you already found it elsewhere…but you need to reverse the yaw servo. Depending on your kk board it’s either in the mixer settings for ch.4 (go from +100 to +100 or vice versa)or you do some fancy stuff with your tx sticks (google it 😉
Hi everybody,
I am actually building this tri, but I am wondering : do I need counter rotating props?! Because Ccrawford seems to have done (check http://ccrawford.blogspot.fr/2012_11_18_archive.html ) but I thought David only uses “normal” props?
Thanks!
Counter rotating props are not strictly necessary on a tri, but my understanding is that having a mix of regular and counter-rotating helps with yaw control. If your props are all turning the same direction, the rear servo will just tilt a little farther to offset.
Also, my counter and regular props are different colors which helps with orientation. As a rookie flyer, losing orientation is the cause of most of my crashes. I’ve added LEDs to the arms to help with this.
If HK is out of stock in counter rotating, either switch to 10×4.5 props, 11×4.7, or just skip the counter rotating. Whatever you do, get a lot of spares! If you’re new to flying, you’ll probably break or bend a lot of them.
Hi !
Thank you for your answer.
Does this mean I have to change the firmware according to the type of props? Or does the firmware adapt on its own?
No need to change the firmware or mixes. If your props aren’t turning the right way, switch two of the three motor wires around. Also, make sure your props are mounted right-side up.
Hi David, hi Everyone!
First thing a huge thanks for this awesome site 🙂
I’m going to build a tricopter v2.5 with some features of the 2.6 (vibration dampener), and I had a few questions:
– should the KK(2) board and the CG be as close as possible to the geometrical center of the star? Or should it be a bit forward or backward?
– in how much wind is it possible to fly?
Thanks!
David has a CG marked out on the pattern for the center board. It’s basically where all three arms intersect when folded out. I had it out in 20mph winds the other day and it seemed good. It was cold though and its wrecking havoc on my batteries. I need an insulated jacket for them. Also be careful when using doublesided foam tape to adhere your kk2 board as it gets brittle and will come off in the cold…I have since then made a reverse carrier for the board which works great! check for pics on my blog @ http://www.rcgroups.com/forums/showthread.php?t=1792815#post23583589
Hi Goodhumormarc,
thanks for the reply 🙂 As I did order the plates directly from David, I didn’t pay enough attention to the pattern…
Your tricopter looks really nice, and flight aibility in 20mph wind is really awesome!
Cheers
Hi David This Question Has Been Bugging Me Since A Lot Of Days, And I think Some Of My Recent Crashes Have Been Caused Because Of Me Not Paying Attention to This Little Detail Regarding the Position Of My Radio Receiver Antenna On The Tri-copter…Any suggestions regarding how to mount the Rx antenna for optimal reception and non glitchy control of the craft…I personally have mine supported by an ice cream stick pointing straight up to the sky…I see here you did not seem to be worried about the antenna position.. and just left it dangling…does 2.4 Ghz signal get blocked if the body of the tri-copter is blocking the RX antenna view…also I have read on forums that it is best to have your Rx antenna underneath the body of your Multirotor….for optimal antenna visibility…what is your take on this..???
I have mine in front of the KK2 board with no issues. All my crashes have been from not hearing my voltage alarm and tail diving (usually at low levels) Make sure your TX(transmitter) is fully charged also. Usually it is safe to keep you receiver (RX) as far away from all other electronics as possible my placement has worked so far for me using a DX7 2.4GHZ and an Orange RX. Hope this helped.
why ni-xx and not lipo???????????????
The battery setting is so the motors won’t shut down at low voltage causing a crash. You need to do the voltage mod to the board to take advantage of the voltage alarm. See my prior post for KK2 link.
thank you very much!!!!!!!!!!
The tricopter V2.5 is a nice machine, I fly with the nem KK 2.0 board, flies super-stable even with self-level off.
Thank you David, your build log helped me A LOT with my first tricopter, very nice 🙂
I want to hover (and have the onboard camera running) as long as possible….
To do this, I want to get my amps down. Can I theoretically fly longer if I remove the red wire from three of the four Plush 18A connectors (that power the BEC and lead to the KK 2.0 board)?
THanx in advance, Flying Eye
Cutting the wires will not change the power consumption of the kk2. Even if it did, the motors consume sooo much more power than the electronics. You’ll have more luck increasing hover time by reducing weight, using larger capacity batteries and experimenting with different props.
Hi David,
As many before me have said, thanks for a great build!
I have built myself one of these and it flys great 🙂 I have looked at various ways of mounting my gopro to it, but still can’t seem to get the props out of its FOV, which when I see your videos you don’t seem to have the props in view. Is there any special setting, position or anything like that that helps you achieve this? Also if its not too much to ask, would you be able to tell me the measurement between the front two motor shafts, so I know I have bulit it correctly, and if that’s the problem that my front two motors are to close together?
Thanks heaps,
Tom
I have props in the view sometimes just to make sure people know it’s a tricopter 🙂
Just move the camera forward a bit and/or change the FOV angle on the GoPro to medium.
Ok I’ll give that a go and see how it turns out 🙂 thanks for the help
This is one of the more entertaining builds I’ve ever done. Thanks for great tutorial David!
Has anybody tried flying in a mode other then Airplane Mode and 2 Servo 90 Degrees Heli?
My DX7 doesn’t support this Heli mode (it only Supports 2 Servo 120 degrees, and 3 servo 90-180 Degrees). Airplane mode produced some non-flyable but amusing results with the rudder.
I have the 1.5 firmware on the KK Plus.
Thanks for any input, I’ve had no luck scrolling through forums yet.
My DX7 setting:
Swash type
1 servo
Norm.
Model Type
Heli
The only channels I reveresed are
Aile. And. Elev
I hope this helps. Mine works fine with this setup and the before mentioned
KK2 board
Hi everybody,
I just finished the build, but as I am a real noobie, I am facing troubles with my RX & TX & KK2 & ESC config.
My main problem is that my ESC are beeping (1 beep per second) and that means “no signal”. I really don’t know what to do.
My KK2.0 screen is lit up BUT blank! Is it normal? Even if I plus my KK2.0 board to my PC using the USBASP tool, the screen lights up but remains blank.
Is it normal?
Here is a picture of my wiring and screen. Hope this helps!
http://img15.hostingpics.net/pics/554765photo.jpg
=> A piece od advice for people who like me are having troubles with a lit-up but blank LCD screen : you may need to UPDATE THE KK2.0 WITH ALL ESC’S PLUGGED !
Didn’t understand why, but it worked eventually…
I now have another problem : my servo doesnt react, it’s like dead. Even when it is plugged, I can rotate it without resistance! Why so? My 3 ESC are plugged so I may have sufficient eletrical power for the servo (plugged on M4).
Can someone help? Thanks!!
=> After hours spent Googling, I can say I have a problem with my servo power supply : it doesn’t work if I simply plug everything in M1-M4. My servo is not supplied.
What did you do? Did you solder M2-M8 positive? Did you make any “bound” to supply the servo?
Thanks in advance!
The servo on mine only works when there is throttle input. When the tris is sitting disarmed no movements. Until the props actually start to turn then I have servo movement. If not check all connections and if you need too check the servo is working bypass the kk2 and plug directly into the RX. If that works check back through this thread got board settings and confirm setup. I’m on my phone and its difficult for me to go that. Good luck!
Marc
Hmmm…
My servo is fried. I have been using it for 20 seconds. Can’t understand how. This is really BS.
Not sure if it the best component of this build…
Anyway thx!
yeah…i used the same servo as Davids build. I had a mild blade strike and I stripped a gear. I now have a standard size servo on the back which has been working great! Plenty of crashes and no problems. They are inexpensive too! the large gears seem to handle any torque just fine. The servo does seem to be a weak point in this because of the direct attachment. If its off in any way it puts undue stress on the servo. other yaw setups where the servo is attached by a control rod offer a little more forgiveness. Once you get it sorted out you will be happy! keep at it! you’re almost done!
Hi David are you selling the templates still? If yes how can I order 2 at once? It doesn’t let you set quantity.
I’m going to build a tricopter of this design – fantastic, simple design, great build tips. I’m in the “plan” stage right now. I’m getting my order ready for Hobby King… but the motors are backordered, and I’d like to ask if someone can suggest a higher-quality, but still cost-effective – and more importantly, available – substitution for the DT750? I’m in Canada, no hobby shops within 100 km.
Hi Cognito,
From what I know, DT750 are very strong and robust enough (even too much?), and – to me – we don’t need higher quality motors!
But I am sorry I can’t answer your question, I don’t know all the motors specifically…
Good luck !
Thanks for the reply. Looks like they’re back in stock now. I’ll give then a try!
Hi, I’m just a newbie on rc stuffs and I just want to know what kind of Rx/Rt you use for the tricopters and how many channels cause I want to build a tricopter as my first project… thanks.
I am using Spektrum DX7s but Spektrum Tx from DX6 are quite affordable and robust.
As a Rx, I use an OrangeRX + OrangeRX Satellite Receiver.
There is no absolute truth but I think this is a good choice, and a good value for money.
A+
I know that different frequencies and systems all have their advantages and disadvantages, and for this initial build, I’ll be using a Hitec Prism 7x radio and Futaba receiver, on 72mhz, that I bought in 1997 or so. I’ve had great fun with this radio in many planes over the years. Just because that’s what I have – I’ve been flying for over 40 years, and for the last 30 or so, I’ve had 72mhz radios, and I’ve found Futaba and Hitec to be very reliable, and locally available. Since I have several available, that’s what I’ll be using. Where I fly, there is no problem with interference from other pilots, or the local radio environment. Were I to buy another radio, I would be tempted again by the FAAST radios by Futaba. But I have no doubt that almost any decent-quality radio will be fine.
Should anyone be interested, I have some of those “Tell a Friend” discount codes from Hobby King. If you’re interested, just let me know.
Here’s a link for my discount codes: http://rcsearch.info/hobbyking/buddy/?u=incognito#catalog
I think this is a great service, discounts for the original purchaser, the next person, and HK sells more stuff. Ingenious marketing. I hope it’s OK to post this here, David,
How does that work?
Click on that link, and you can see the things that I ordered. If you want any of those items, just select it, and put it in your cart. You get my “Buddy” discount, and I get a credit. There are thousands of items. You need a Hobby King account.
And can I buy more then one all at discount?
thanks a lot for the info guys. More question, is there a difference between the rc plane remote and the rc helicopter remote? and how many channels do I have to use so I can operate a tricopter?
A transmitter designated for “Helicopters” has some specialized settings in the radio itself specifically for conventional R/C helicopters, and you can use a Heli radio for this project if you have one. But a Helicopter transmitter is not required for these types of multicopters. You can use a regular 4-channel (minimum) radio for fixed-wing Aircraft for this tricopter.
David – since you’re in the U.S. tight now – are you still making/shipping the frames?
Crashed my 2.5, I think the tail assembly came loose and the prop fell down to be at a 90deg angle, spinning out of control. It all happened so fast I didn’t even kill the throttle 🙁 Luckily damage wasn’t too bad. My CF arms didn’t break 🙂 Need LOTS more props though
http://www.youtube.com/watch?v=nzTaiYPCpbw
Im having a difficult time purchasing the equipment necessary to build this tricopter. Hobbyking seems to be out of most everything. Is there an alternative to hobby king?
ps Im in the USA (california)
I initially had the same problem, but in less than a week, everything was back in stock, and my order is on it’s way. Set up your HK account, select everything you need (put it in your cart), but don’t place the order yet! Sign up for the email alerts for stock info on the HK page. Once everything’s in stock, complete the checkout process. Worked good for me. Don’t forget the buddy codes, at least use the it on the ESCs, that’s a $10 saving. (And I have nothing to do with HK, just discovered them a couple of months ago, and the service has been great – better than some Canadian mail order outfits.)
Thanks for the reply. I was able to purchase the last of the equipment today. How long do the shipments take to reach the USA? I would think it would be a good business idea to stock a warehouse full of this equipment in the USA so it can be shipped faster. I’m sure people would pay extra to get the packages faster and not have to deal with customs, but that’s just me.
And I just today received notice from Flite Test that my frame set was shipped today, so ya, even though David’s in the US, the frames are being made and shipped to customers who buy them here.
looks like they printed labels but haven’t shipped them yet, but at least they’re still making them. One item i cant find is the 4mm carbon fiber rod. Would you know where to buy these in the USA?
No idea, I’m in Canada. I would just use a piece of appropriately sized wire. There’s lots of possibilities. I’m not going to build the same yaw mechanism as is shown in this build, but I am using a nose wheel assembly, some clevises, and a pushrod.
So I’m assembling the list of items I need for this tricopter build, first I’ve done. There are two key items I can’t get my hands on from HK, the nose wheel mount and the specified motors. I was thinking of using the similar motor that is 700kv with slightly larger props. The nosewheel supports I’m at a loss on. I could try using alternatives from DuBro, but if someone else has a proven alternative, I’d love to hear. Thanks!
There are a bunch of alternatives for yaw mechanisms. Do a google search for tricopter yaw mechanism and you’ll see a few different ways people have done it. Some are as simple as a seperate section of the arm rotating on a pin or screw linked with a small actuator arm.
I actually fried my servo because I screwed up the yaw mech that David has made. I had problems attaching the motor and also used a standard size shaft (vs. metric). In my zeal to attach the motor I either obstructed the swivel with a zip tie or got some ca glue where it impeded the swivel. I may try another landing gear yaw mount or go with something else.
Where are you at? I can give you an extra mount if you want one.
I’m in Illinois, USA, if you still have one. Out of all of the methods i’ve seen so far, I still like the simplicity and apparent durability of this one.
Hey guys need help I’m almost finish with my tricopter build when suddenly my motors don’t work right it, the three motor don’t spin at the same time one motor spin first then when I put the throttle to middle to max then the second motor spin but the third motor didn’t. Did I do done thing wrong and basically I just follow the connection on the kk2 board but still it’s not working properly. I need your help guys I’m just new on this hobby and I want to really make this a success build. Thanks….
Maybe you need to calibrate the ESC’s. Have you looked at the video I linked below in the post? Might want to give it a try.
Hey guys, would like to get your input if I could. Just about finished my build after long delays and just not having time to work on it.
Couple of things:
1) I burnt out a servo because my yaw mech. was stuck. oh well, ordered another servo and disconnected the broken one.
2) In looking at “Hallstudios” video found here:
http://www.youtube.com/watch?v=e6K4NXoq-Qk&feature=player_detailpage
I tried going through the KK2 set up like he shows and was having problem with the ESC calibration. What I later descovered when running the receiver test through the KK2 board was that my throttle is being activated on my right control stick which should be my elevator and my elevator is on the right.
I have a mode 2 FlySky (Turnigey) 9X. The function layout between the KK2 and the receiver pretty much match exactly with:
1:Aileron
2.Elevator
3.Throttle
etc. So first set of 3 pins on the KK2 got to channel 1 of the receiver… all the way down. Why is my throttle activating from the right control stick on the transmitter?
Am I correct that the spring loaded control stick (on the right in mode 2) should be the elevator? I would think so since it snaps back to center when not held.
Is there something I should be doing (set-up) on the 9X transmitter that I haven’t done. Is there a set-up guide for transmitters any where?
Finally, does me disconnecting my yaw servo since its failure have any input on the other testing I’m doing?
thanks for any help you guys can provide.
OK, got it figured out.Guy over at RCGroups helped me out. It was the Tx. Had to set up the mode 2 settings, all good.
Made a new Yaw mount today. It is much better with a smoother side to side motion. The key was how I was drilling out the shaft holes and taking my time. Now just waiting on the new servo which should come in this week, I hope.
Hey guys! Need some help tuning my tri. Props and motors are balanced and its hoovering great, but i have a major wooble issue when flying in straight in low/mid speed.
my settings are:
gyro aileron\elevator
p gain 35
p limit 100
i gain 25
i limit 20
gyro rudder
p gain 45
p limit 100
i gain 20
i limit 20
self lev
p gain 65
p limit 65
i gain 0
i limit 0
http://www.youtube.com/watch?v=YKswseJBFeY
Seems to fly well but ya I see that slight wobble. I wonder if it could be your yaw mount/servo moving back and forth?
My servo mount are properly secured. (glue and zip-ties.) If i fly at high speeds it seems to be pretty good. Could it be my gains are off?
Can anyone tell me what did I do wrong cause I just fry two of my only servo for my tricopter. I just follow the instruction on the kk2 board on where I put the connection of the servo to the kk2 board and still it didn’t work and at first it tilt to the left every time I turn it on and it doesn’t move even I turn the throttle on and move the yaw or ever the roll and pitch.. Please help…
try connecting it to the receiver and see if it works. Settings on the kk2 can make it so the server doesnt move, so check that too. My blue bird went out too.
hi guys got to ask some question…. is it ok to connect 2 2200mAh 3s 35c lipo pack together to power the esc’s, motors, servo, kk2.0 board, fpv and led light strips at the same time? or is it bad? if anyone have a better idea on how to do such thing can you please help me… thanks in advance and by the way I steal need help about the servo problem still I can’t figure out what is wrong cause i steal burn my last servo. I have no idea what to do with that problem. thanks again in advance.
I have built this tricopter, and so far I like it a lot. But I have some trouble setting up the KK2 board correctly. I am looking for really smooth video. Can someone please post their P and I settings (and maybe autolvl too?). That would help a lot to get me started. Thanks 🙂
Ugh, Hobbyking is out of stock on the dt750 and the dt700 in both the USA and international warehouses and they’ve been out for two weeks now. I’ve been thinking about the getting the ntm 28-36 750k instead. Does anyone use that motor for a substitute? Or does anyone have another motor they’d recommend?
I ran into the same problem. I’ve been waiting for these motors for weeks now and decided to give the NTM 28-30A 750KV a shot. I’ll let you know how it goes.
I ended up going with the NTM 28-36 750k. They were $16.12 each vs $12ea for the DT750s. But because of the way they mount it looks like I may have to cut off the motor shaft or figure out how to reverse it.
I just noticed that the DT700s are back in stock in the US (thanks for emailing me HK, NOT!) so I’ll take the plunge and cut off the NTM shaft and if it doesn’t work I can just pick up some DT700s real quick.
OK! I finally got all my parts in and have a completed Tricopter! One piece of advice, definitely pay the $30 for the Hobbyking KK2.0 Multi-rotor LCD Flight Control Board. If you want to go with the cheaper KK2.0 board, make sure you also pick up a USBasp AVR Programming Device for ATMEL proccessors. I tried to be cheap when I initially ordered and got the non-LCD KK2.0 and then realized I had no way to connect it to my PC to flash it. So I went back to bite the bullet and order the LCD KK2.0 and Hobby King is out of stock. While I wait for the AVR cord to arrive I’ve gone with the Hobbyking i86 Multi-Rotor Control Board. That seems easy to program (DIP switches) so hopefully it will work with the tricopter.
The problem I’m having now is I don’t seem to have any power. I push all the way up on my throttle and the motors all spin, but not enough to lift the tricopter off the ground. When I get home tonight I’m going to try programming the ESCs using the BESC board (I just left them “stock” when I installed them) and see if that helps. Could it be the transmitter too? I have the Spectrum DX7 and just selected “heli” mode to drive the tricopter. Is there a throttle setting in the DX7 I should be messing with?
Another N00b issue. I’m using the (cheap) OrangeRx R410 Spektrum DSM2 Compatible 4Ch 2.4Ghz Receiver with my Spektrum DX7. When I was calibrating and testing the tricopter I was turning off and on the receiver all the time but I never turned off the transmitter. I guess when the receiver was turned back on it failed to bind with the transmitter and I never got my calibrations to work. Turning off both the transmitter and receiver fixed the issue and I was able to properly calibrate the ESCs and the tricopter is flying! Now I just gotta get the fine tuning down. But at least it’s in the air!
Well Done David,
This is excellent. With this and the 2.6HV it looks like you have cleaned out Hobbyking for Tricopter parts.
I am looking forward to your new camera mount becoming available in the FliteTest store then I can upgrade.
Alan
Hi everyone,
I am new to RC, and I am, to put it bluntly, a complete n00b.
So, I have a question, which probably sounds simple enough, but I am not sure.
What controller(s) can I use with it? I have one from a cheap RC Helicopter, but I need your help.
This is my first RC build.
Thanks for your time!
~Brad
Would this one work?
http://www.hobbyking.com/hobbyking/store/__16255__Hobby_King_2_4Ghz_6Ch_Tx_Rx_V2_Mode_1_AUS_Warehouse_.html
Thanks
Or this: http://www.hobbyking.com/hobbyking/store/__16254__Turnigy_9X_9Ch_Transmitter_w_Module_8ch_Receiver_Mode_1_v2_Firmware_AUS_Warehouse_.html
Probably would prefer the Turnigy.
Either of those will do, but if you plan to continue in RC and use the radio in another model, I’d get a transmitter in “Mode 2” – this is the most common mode for flight. (Mode 2 means the left stick controls Throttle/Rudder and the right stick is Aileron/Elevator.)
This is a great build. I read your entire build log and parts list. Hobbyking is a very good resource for parts. You have some very neat tricks to make your tricopter more efficient. Thanks for all the great information and photos. You really broke things down so that newbies like me can understand the building process in detail.
Hi everybody,
After a crash I now intend to fix EVERYTHING before flying 🙂
Here is the problem :
Autolevel is OFF and ESC are supposed to be calibrated.
My trims are all set to zero.
When I power on the tri, all the motors start at the same time (when throttle = 10). But then, Motor 1 keeps on accelerating while Motors 2 and 3 stay at their current speed, which is low.
Why is motor 1 accelerating on its own?! Autolevel is off so it is not supposed to compensate anything, isn’t it?
The KK board is always trying to fly the tri, even when leveling is off. If your board is not mounted facing forward, or the motors are attached incorrectly, or the board is not leveled/calibrated, or your rx/tx is not zeroed out, or props are not on right-side up, or probably other probs…then one motor may try to run away to correct what the board sees as an out-of-balance situation.
Take off your props, THEN check:
– KK2 is facing forward. Orientation matters. buttons near the tail. Mounted level to the ground.
– Make sure motor numbers are correct. (rotation is less critical)
– Make sure RX/TX controls are correctly connected and configured on your radio (especially aileron) check with KK2 setup.
– Make sure controls are zeroed with KK2 setup screen
– Make sure props are turning in the right direction for the prop type and that props are mounted right-side up.
Thank you ccrawford, will try to fly soon 🙂
Guys Im trying to build this tri and need a piece of advice. Do I need counter clock wise and clock wise props or I can buy tower pro slow flayer 11:4.7 for all three motors and just make sure that they spin in correct direction???
Thank you in advance.
Hi supermagicpro
I have used 3 pcs of the most commen CCW props on a tricopter(I like the slow-fly GWS-type 10 x 4,7 on DT750 motor). It flies very nice both slow and wildly. I just leaned the right front motor about 5-7 degree forward and the front-left motor 5-7 degree backwards. It much easyer to keep only one prop-type in your own stok, when your favorite pros is almost constantly backordered for example at Hobbyking. And it cost only a little in flighttime. Happy flying !
Here is my tricopter build based on your design
Thanks for sharing
–> https://plus.google.com/photos/106651899791066404508/albums/5867471266935120737?authkey=CPvUueTn-N6zmAE
Hello everybody,
I’m going to build such a tricopter, as well. And I’d like choose a proper transmitter. Will be Turnigy 9XR Transmitter a proper one?
Thanks for any help.
Hi everyone
My friend and I have decided that we want to build this tricopter, and we have a few questions. First, with the programming card, how do you program the tricopter? Also, how do you connect a remote to the tricopter? Finaly, we want to hook up a camera. How wold this be done?
Sorry if these questions sound stupid, but we have no RC experience, and have little DIY experience, so we will tend to ask seemingly stupid questions!
Thanks!
I highly suggest going back to the beginning. Read over everything including the comments as all these questions have been asked and answered in fine detail within this thread. Once you have some knowledge of what you need a somewhat educated question has more aptitude to be answered. Knowledge is priceless when it comes to this hobby. Please read accordingly.
Marc
Looking for some advice
tricopter, kk2.0 board running firmware 1.5
Spektrum DX7
Built a version of this tricopter and I’m having problems with the servo wanting to tilt hard right when I throttle up for take off. Makes it hard to control right off the bat.
Servo works fine at lower speeds tilts right and left as expected. Just seems to drift one way or the other and not want to center at higher speeds.
I have used two sets of escs now both calibrated and the second with simonk firmare. used two sets of 1300kv motors. over 3 different metal gear digital servos. countless hours balancing motors, props.
I’m using an all wood frame and the board is mounted with rubber washers for vibrations.
Wondering if I have something wrong with my radio.
It would seem my air frame works better with the Hobbyking multi rotor board version 3.
Flashed it with Tricopter v 1.5 by KapteinKuk and the yaw servo seems to be working flawlessly now. I can go full throttle now and the servo sits in place pretty like.
We’ll see how she acts when I put the props on.
Hi everyone,
I finally built my tricopter some time ago and it’s really awesome once correctly set up!
I’m filming and taking pictures with the HorizonHD v3 with Foxtech’s trigger and it’s working quite well also. Some pictures here: http://www.flickr.com/photos/chatluthier/
I also changed te dampening system (which did suffer a bit too much in various crashes) for ears plugs taken in sandwich between the bottom plate and the camera plate, the whole thing being hold by shrink tape (tube). It works very well. I will try to add some pictures of that if someone is interested.
Cheers
Hi Guys,
as usually the Servo BMS-385DMAX is in BK, I´d like to use an cheaper solution too, I´ve read that the MG-90 can do, but the BMS-385 brings over 4KG and the MG-90 only 2.5KG. Did Somebody knows what Servos work for the 2.6 tricoper too? How many KG we should need?
Best wishes
Ben
Hi. Should I flash the Turnigy 18A Plush ESCs with SimonK? And if I do, do I still need to flash them afterward with the BESC programming card?
Is anyone still following this thread? I’m a totally newb and any help with the SimonK/BESC programming card issue would be greatly appreciated.
I didn’t bother to flash the ESC’s with SimonK software – I just used them as they were, and used the Programming card to set them up as shown in the instructions here. My tricopter works fine. Hope this helps.
I finally have by tricopter built. When I first turn on my kk2 board, it pins my yaw mechanism servo to the left and I can hear the gears still trying to turn. I’m afraid to take the time to set up the kk2 with the servo acting like this because I don’t know if it’s being damaged. What should I do?
Disconnect the servo…
Power up the KK2,set it up for Tricopter, go through the calibration procedure, have a look at the input screen, see what the board is seeing from your receiver fro the rudder input, adjust accordingly. This board and this build will assume you are reasonably technically competent. Everything you need to know is here, or can be easily searched.
Can you recommend any props that already have a 4mm hole? Do you think pops avers are a good idea?
http://www.youtube.com/watch?v=8dXj37fe_aI
this is a video made with this build 🙂
Hi everyone,
I have made the tricopter v2.5 too!
I used kk2 control board with flashed firmware 1.6 from “kaptenKUK”.
But it has some problems on flight: sometimes, it gets imbalanced easily and very unstable, too, (there are moments when it leans left and right as if it is trying to be balanced but so abruptly that it causes more balance problems)
Apart from that, everything else seems ok.
I am confused! I suspect it is the soft wooden arms that vibrate and send improper info to gyros. Do you think manipulating arm vibration will solve the problem or is it something else?
I would appreciate a prompt answer.
Thank you in advance.
Kostas
Hi Kostas,
I just built this tricopter about a month ago, and it took me about a week to get it hovering smoothly with hands off and no wobble. I can tell you what worked for me and you can check it out on yours.
First of all, I assume you have SL ON. If not, you should definitely start with that.
Secondly, you are correct that motor/prop vibration makes a big difference. But the wooden booms actually dampen the vibrations better than any other material. So you have to start with lowering the vibrations at the source. Balance the motors without props if you haven’t already. There are lots of videos online. I actually take the motors apart and balance the motor bells between two magnets. That might be overkill, but I like it. Then balance the props. I use a magnetic balancer to find the heavy side and use a 1 inch piece of scotch tape on the underside of the light prop right in the middle. Once balanced, the props should hold their position no matter what orientation you place it at UNLESS you have an unbalanced hub on the prop. That’s when you balance the props horizontally on the balancer and they flip over to the opposite horizontal position. If that’s the case, you can add some hot glue to the light side of the hub. But in my limited experiece, you should save these props for airplanes instead. Once you have the motors and props balanced separately, you can mount the props on the motors and use a seismic or vibration app on your phone to test each arm of the tricopter. You can also just use your hand to feel if one or more motors are vibrating more than the others.
If you have a crash or a rollover, rebalance your props. I found that after a crash, two of my props were still balanced on the magnetic balancer, but one side of each prop was slightly bent downward. It did not matter if it was perfectly balanced or not…the vibrations were too much and they needed to be replaced.
If your motors and props are balanced, make sure your tricopter is balanced right at the center of where the three booms meet. Also check to make sure that your KK2 board is mounted directly over that same spot. Because you want to limit the vibrations getting to the KK2 board, I would use a combination of plastic nuts and bolts with double sided foam tape.
Lastly, make sure all of your electrical connections are good and properly insulated. My bullet connectors tend to pull apart just slightly after a couple of flights, and this exposes the metal from underneath the shrink tubing. You don’t want to short out an ESC or motor momentarily during flight.
I hope this helps. Best of luck.
Thanks a lot, i appreciate your reply 🙂
Your tip about balance the prop after crash was very interesting.
Yes, i use self level with ‘Pgain’ about 45 to prevent imbalance.
I didn’t balance any motor.I thought it wasn’t necessary for first flight.
I am also thinking that ESC’s might lost their setings when i flashed the firmware on kk with the ECS’s connected to the kk!
I am thinking that because i hold the tricopter in my hands with about 10% throttle and lean it front,back,left and right;I had to lean the tricopter too much for the front left and back motors to start!
The second flight was a success!Thats whay i am so curious to find what happened!!!
Kostas
Hi Kostas,
Once you flash the KK2 firmware, you need to start over with ESC calibration, board settings, zeroing your trims on your radio. All three ESCs need to be calibrated withe KK2 at the same time. Use your sub trims on your radio to center your sticks with the KK2. Read the 1.6 manual for full instructions.
I can almost guarantee that your motors are not balanced. All three of my DT750s needed fairly substantial balancing. If you are using the same motors, there is a video on how to balance the bells using magnets. I placed the magnets on both sides of a vise and adjusted the vise until the shaft was touching one magnet only. Then I applied small amounts of tape in the same spot on the lighter side until it balanced correctly.
Also, I cannot stress enough about securing your KK2 board. David is an expert pilot. I would not secure my board with foam tape…it will get wrecked. Get a travel soap box with a lid (or anything similar) and attach it to your frame using two of the screws that are already in the frame. Use some foam tape between the box and frame to cushion the box. Then you can use foam tape, plastic bolts and nuts, or any combination of those to mount your board and receiver inside the box. That will protect it and isolate the gyros from vibrations.
Hi Budge,
Thanks a lot for your prompt answers. 🙂
I used these to mount the kk:
http://www.hobbyking.com/hobbyking/store/__15214__Gyro_Flight_Controller_Mounting_Pad_10pcs_bag_.html
I haven’t balanced the motors yet. I am on holiday so I haven’t got any tools at the moment.
Before I flashed the firmware (fw) the board had the 1.2 fw and I had done all the calibrations(there is a possibility that I hadn’t programed the left ESC correctly).
I tried to calibrate the ECSs through the kk option (push and hold 1 and 4 buttons when throttle stick is full and so on) and not through a programming card.
I didn’t hear both configuration beeps after this process, as expected; just one. Is this considered a problem? After that, (by holding and leaning the tricopter at 10% throttle,as before) all the motors seemed to have a good response!
When I tried to fly it again, I realised that I couldn’t because I had destroyed the servo horn in a previous crash. 🙁 When I fix it soon and have a proper flight, I’ll post the results here.
Keep in touch. Thanks again.
Kostas
I built one of these bad boys, I noticed that I always have to trim the tri for every flight. Is there a way to overcome this?
David, the servo appears to be sold out (it has been sold out for weeks) — is there a similar servo that would also work?
Hi David. I have a problem when taking off. The copter tilts to the right and starts to spin CW.
Everything is built and adjusted according to your excellent instructions. Gyrocompensation works fine and all motors spins up/down by the sticks. Yaw is also centered.
Could it be the Gain has to be adjusted?
Anyone else had this issue?
Hauk.
Hello,
I want to build a tricopter using dt700 kv motors with 30a blueline hobbyking esc’s and a hk it86 control board.
Can tell me if this will work?
Also i want to use a 2,5 kg mini servo. Is this strong enough?
Thanks for any feedback.
Benno from the netherlands.
Hey David,
Love the instructions. A couple suggestions:
1) I’d suggest adding a link to your Flitestest video about the 2.6 build at the top of the post.
2) I’d suggest adding the KK2 controller to the list of stuff at the end.
This is my first multicopter, and I have a problem with my tricopter spinning (yaw-wise) out of control. I was wondering if anyone had any advice about what the TX settings. For example, what should the exponential and end points be for the yaw?
bonjour tout le monde!
désolé de m’exprimer en français, mais je n’ai que 14 ans et j’ai peur de commettre des fautes en anglais en rédigeant ce message…;)
voici ma question: j’ai tout bien réussit à monter mon tricopter, mais je ne connais rien en programmation de la carte kk 2.0
Je l’ai déjà réglé pour un tricopter (est-ce juste ou faut il choisir le y6?),effectué tout les réglages pour les moteurs et calibré ma carte.
Mais, lorsque je revient à l’écran principal, la carte m’indique “safe” et “safe-level off”
comment puis-je armer la carte et passer en “safe-level on”
De plus, la carte m’indique que le la batterie est à 0.0V j’ai appris qu’il fallait en réalité ajouter une batterie à part pour alimenter la carte, en soudant une entrée batterie au dos de la carte dans des connecteurs prévu à cet effet. Est-ce vrai ou peut on se passer de cette batterie supplémentaire?
dernière question: dans quel menu de la carte faut il aller pour pouvoir étalonner les ESC?
merci d’avance dans l’attente de vos réponse d’experts!
Merci à David pour ce projet super bien expliqué!
Hey David, help me to specify the motor for this project.
what the good motor can i use from the list bellow:
Turnigy L2210-1400 Bell Style Motor (210w)
Turnigy DST-1200 Bell Motor 1200kv (160w)
Turnigy L2210C-1200 Motor (150w)
How current (A) for my ESC?
thanks for your times,
Hi, I know this is waaay too late but I was wondering if you eventually used the L2210-1400s. If you did, how did it go? I plan on buying these, what is your recommendation?
If you have forgotten, here is the link to the motor.
http://www.hobbyking.com/hobbyking/store/__46573__Turnigy_L2210_1400_Bell_Style_Motor_210w_UK_Warehouse_.html
Thanks.
Hi all 🙂
i am a beginner in all this and was wondering if there is a simple cheap fpv setup that i could build/buy … thanks 🙂
Hi sir ,
I am really glad 2 ask help from u .
Which remote/transmitter is suitable for the tricop v2.5?
I have built this tricopter and was wondering what i have to do to run a 4s battery on this setup?
As long as your motors and escs can handle 4s your good to go! I found that mine had a lot more go with 4s and now thats all I fly with!
Hi,
Very nice tutorial!
I’m very interested in building this tricopter.
I noticed the links to the propellers at HobbyKing don’t exist anymore. Could you perhaps propose some current ones?
Also I have no idea what remote controll would work for this trircopter.
Could you perhaps propose a beginner’s remote and receiver?
Thanks in advance.
Regads,
Joachim
You were saying to cut the booms at 48cm. I watched the video of simple copter and he says his booms are 12 inches long. The video of his tricopter, the booms look a lot bigger. He is also using the 2212 motors 1400kv, Also using the 8 4.5 props. What prop size are you using with your set up here.
You can definitely reduce the length of the booms for a little more maneuverability. I built with the original 50cm booms, but have since reduced the length by a few cm. Seems little better to me, but I’m not the best pilot out there by any stretch.
All the info is at the top of this page. This build uses much larger motors spinning 10-12″ props. The 1400 kv motors which spin faster and require smaller props. The center Frame is essentially the same. The larger arms allow for prop size and stability. Re read the info on the top. This is a well documented build. This is a larger tri for carrying weight. The simplecopters tri is purely for aerobatics
After completing the build, you do not talk about the CG that I see. I don’t see anything that you did to balance the tricopter. Do you move the battery location since its the most weight underneath the tricopter. I have the template which shows the CG close to the rear boom. Using sticky weights would probably work out good to.
Ok so you know the left bits of motor shaft you have after cutting off the excess? Don’t throw them away. They make PERFECT shafts to between the nose steering mounts. You don’t need to drill them or anything. Everything is finger tight. I just used two of them and thats it.
I kinda understand your set up. I’m using the steering set up in this rcexplorer build. Where the motor sits I have tie straps. The shaft your talking about would go through those front holes. How are they hooked to the horn from servo?
Everything else is the same. I’m using the motor shaft bits instead of the carbon rod, that’s the only step I did different. Mounting the servo horn, etc, is all the same.
Hey David. I am right in the middle of building this tricopter. What fun and a new learning experience. A person does not get anywhere if he doesn’t push himself into new unknowns. Thanks for the wonderful build instructions.
I do have a couple of questions. This is my first time to program my ESC’s for any build. I have the card programmer and made the selections just as your picture. However,,,,,,I would like to learn the “whys” for the changes. Especially, selecting the battery type “Ni” instead of “Li.” Is that so the esc does not cut off at the standard lipo low voltage setting,,,,,,leaving voltage management up to the flyer? Where might I go for an explaination of the other settings?
Lastly,,,,,I attempted to unsolder the leads of the esc’s so as to add the required longer wires. I have a great soldering iron,,,,,but was unable to melt the factory solder. What is the trick here? Right or wrong,,,,,I ended up splicing on to the existing leads. Let me know this learnt trick.
Thanks again for making this build available.
Correct, setting it to NiCD/NiMH will prevent low voltage cutoff, but beware, I have destroyed one LiPo battery with such setting while setting everything up. Just haven’t realized it could go below 3V per cell.
The default solder on Plush 18A seems to be lead-free, or at least not 60/40 or 63/37. You should mix this solder with your own solder, by doing so you will make better contact and eventually melt the factory solder down.
I could perform resoldering of these wires only after I’ve got myself Goot PX-201 ($40 70w ceramic heater soldering iron with replaceable tips and temperature regulation), you can also try to remove the flat metal heatsink while you are soldering, but I do not advice to do so because it prevents overheating.
If you have a good soldering iron, just try to apply some solder as I’ve said above.
Thanks hertz for the two post. Very helpful. I did set my esc’s to the NiCD/NiMH setting. And since then,,,,with a little research on the Hobby King website,,,,,I found a WONDERFUL little gadget for little $$ that will help you monitor the voltage drop of the lipo while in use if you don’t have an expensive radio with telemetry as part of it. It is made by Quanum and I don’t know why it is not talked about in every thread.
http://www.hobbyking.com/hobbyking/store/__56391__Quanum_Pocket_Vibration_Telemetry_Voltage_Meter_With_Alarm_915Mhz_FM_.html?strSearch=quanum%20vol
At least for me,,,,it is the perfect solution and I have yet to find a negative about it. At least it gives you some idea of when you have reached a preset cutoff and when to call it quits. It has actually allowed me more flying time per battery because I no longer bring the plane down blindly early. Pass the info onto your flying buddies,,,,,especially the beginners.
I hope David reads this,,,,,I would like to hear his thoughts on this ultra simple device.
I built a version of this, almost identical except I put a stronger/faster metal gear servo on it. I came across a naze 32 and wanted to know what I needed to flash that with to control this copter. The clean flight is only setup for 4+. any suggestions?
thank you very much
i like the article
it can help me
http://www.freewing-model.com