

I’ve been working on the Mini Tricopter for quite some time now and to be honest the design has been more or less done for almost a month. However I haven’t released it on the store for a couple of reasons that I would like to discuss with you, and hopefully get some input on how I should proceed.
The design
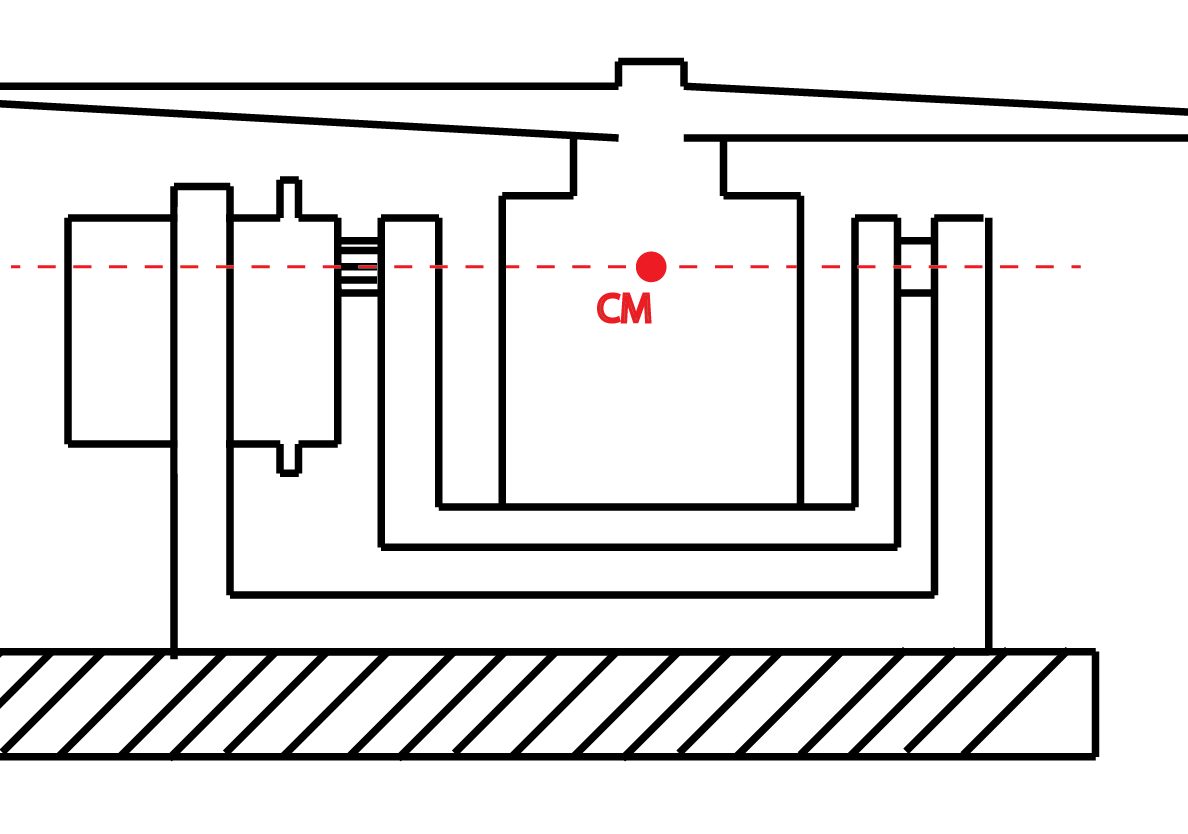
Designing a Mini Tricopter really is like stuffing 10 people into a VW golf; It’s going to be pretty cramped. The tail rotor limits how far back you can fit things, where as on a Quad you can stretch out the gear forward and backwards without hitting anything. However, putting all the gear tightly together means that the center of mass is is very close to the center of gravity, which means good and equal handling in both axis.
I’m fairly happy with the design overall. It’s cramped, but it does work well. It uses the same Naze and PDB as the original tricopter. It also uses the same servo, tilt mechanism, motor mounts, front spacer and arms (cut to half length). Which means that anyone with a regular size tricopter easily can convert theirs to a Mini Tricopter simply by cutting the arms and screwing on the Mini Tricopter add-on frame. (Be careful if you do decide to cut carbon fiber though, it is damaging to the lungs/eyes and so on!)

The frame has a built in adjustable mount for a board-camera with up to a 40x40mm footprint. The angle can be adjusted continuously between 0 and 40° so that you can start out easy and as you progress in your flying, you can add more and more angle to the camera. The camera is also well protected by the frame itself and the fact that it is held in place by rubber bands, which protects the camera even more during a crash.

The Mini Tricpter easily carries a GoPro. Unfortunately I couldn’t make the GoPro protected inside of the frame without compromising the design. The GoPro 4 sessions does fit inside of the frame, as does a Mobius camera. The Original Gopro sits on top of the frame using the original GoPro mount and housing.
The recommended setup would be:
- 4S 1800mAh 45C LiPo
- DYS-2208 1800kV
- DYS-SN20A BL-Heli ESC’s
- HQ6x4.5 props

The setup is great. It draws 60A on full throttle (20A per motor) and top speed is almost 100mph/160km/h (with some tail wind).

Flight time is decent at around 5 minutes and it does take a crash well. The arms fold up absorbing energy and the tail stands up to the punishment much better than expected.
Overall I’m very happy with the design. Still, there are a few things weighing on my mind…
The flight characteristics
This thing is faaaast. The thin arms and smallish body makes it rather aerodynamic slippery. It requires very little power to cruise at a pretty respectable pace, and herein lays one of the problems. I originally designed this Mini Tricopter to be a racer, and sure it can race. But not on small courses. The problem is that it’s simply too fast once you tilt it forward and start racing. I discovered this during the AGP race in Austria. The corse was around 1/3 as large as I had imagined it. The quads simply tilted forward and controlled their speed by throttling up and down. The drag of the frame slowed them down quickly when the throttle was lowered. This was a huge advantage as they could control the speed without loosing visuals on the gates. The tricopter, meanwhile, more or less kept its ludicrously high speed and needed to be tilted back to slow down, making it very difficult to manoeuvre the course.

When I did make it a complete lap it was very quick, though. The problem was that I ended up crashing a lot as the gates came up a little too quickly. It seems like the race courses I’ve seen from other competitions are larger though, so this might not be a problem, except for on very small courses. (Any experienced racers out there that can confirm/deny?) But I feel I can’t call this a racing tricopter based on my experience in Austria.
The next problem is the yaw. On the larger tricopter the performance and feel of the yaw is superior to that of a quad in the same size (in my opinion). It’s a more natural, analog feeling instead of the very digital, mechanical feeling of a quad. The issue arrises when you shrink things down. The shorter arms and huge thrust range of these mini-sized copters forces the tail servo to work extremely hard. The result is that the tail on a Mini Tricopter doesn’t feel quite as locked-in as a mini quad or a bigger tricopter. It does these little wiggles here and there, mainly with rapid throttle changes. I’ve spent many many many hours testing different PID’s, TPA’s and firmware changes but I simply can’t get the yaw to perform as well as I would like.

For instance while doing a slow flip with the throttle reduced a lot, the copter might yaw a couple degrees and it might wiggle a little when punching the throttle again after the loop is done, or when doing very long vertical dives with very little throttle the yaw I term maxes out and it turns to one side
(I should be able to fix this by modifying the code, will report back on this).
When doing a lot of fast throttle changes you can feel the tail working, compared to a mini quad or bigger tri, where it you hardly notice that there is a yaw axis. The tail on the mini tricopter feels like there is a little gnome reacting to everything you do. He does a great job, but you can still tell he’s there. It makes you notice that the yaw axis is a factor where as in a mini quad you don’t.
The Mini Tricopter is still a bucket load of fun. It loves doing fast, long low-passes with big wide turns. Loops and rolls are very fast. It’s great at chasing other aircaft. It flies sideways and backwards just as well as the larger tricopters. Since it’s pretty aerodynamic it does cover ground fast without much throttle, which gives longer flight times with higher speeds than the typical mini quad can provide. Proximity flying between trees and such is also something it is really good at. The yaw is crazy powerful compared to a quad. Overall it’s a really fun little machine.

I’m torn. On the one hand the mini tricopter is great fun, but on the other hand it doesn’t perform as well as I wished, nor as well as a mini quad. That is why I haven’t released the kit yet. It’s not great at racing, as it only has one speed when tilted – Insane!, and the yaw isn’t as good as on a quad. I don’t want to sell a product that people are disappointed in. But I might take this too far. The copter does fly well and it is a ton of fun, it just doesn’t have that super locked in feel on the yaw as a high-end quad. It’s also much more work to trim the PID’s on the yaw, if you do it from scratch. But I would supply PID’s that would be good for the recommended setup, so it might not matter as much?
I need your opinion. Should I scrap this project and move on to something else, or I’m I overthinking things? What do you think?
{kind=link}
{kind=link}
{kind=link}
Leave a Reply
You must be logged in to post a comment.