

Ever since building the Tricopter V1 I’ve always tried to find ways to improve the construction. I always try new props, motors, esc’s, arm lengths, tail mechanism and such. Often I change stuff before each flight. Always in the quest to find the optimum setup for me.
The Tricopter V2.5 is more of an alternative to the V2 than something completely new. It uses different motors, speed controllers and tail assembly. There are also some minor changes to make the build a little easier and a little more crash resistant.
There is a new theme to the build: zip-ties. I love zip-ties. They make the build quick and easy. They break in a crash absorbing energy. These weak points are the key to the crash survivability of the tricopter. Rather than replacing a motor axel that has been bent, you simply replace a broken zip-tie. This can easily be done in the field as well.
Enough talk, let’s build.
Specifications:
Motors: DT750 750kV Motors
ESC’s: TURNIGY Plush 18amp Speed Controllers
Battery: 3s Turnigy 25-35C 2200mAh LiPo
Servo: BMS-385DMAX Digital Servo (Metal Gear)
Props: GWS 10*4.7 or GWS 11*4.7 for heavy lifting
Arm length: ~50cm (center to motoraxel)
All up weight: 860 grams (Including battery) (670 g without)
Amps during hover: ~10A
Motor test: [email protected] – 7770RPM – 1080 grams thrust / motor

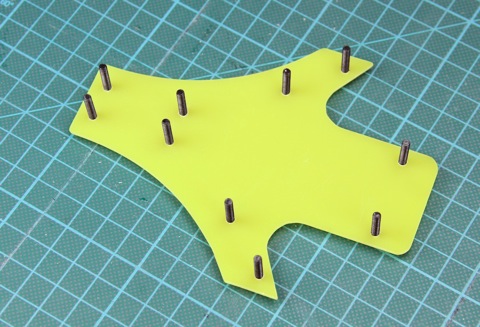
I still like the V1 template and a friend of mine was nice enough to cut a few for me on his CNC machine for me.
Due to popular demand I now offer pre-cut V1 tricopter frames!

10 M3*16mm screws is needed. I used these hex screws.

All three arms are the same length. I cut my arms to 48cm. The arms are 10*10mm pinewood.
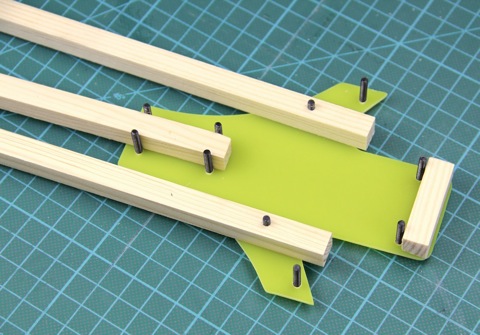
The holes in the front wooden arms are drilled 25mm from the edge. It’s slightly further in than the template states, but the extra material stiffens the frame a bit and is helps the durability. The little wooden piece in the front is 40mm long and helps stiffen up the frame considerably.

Time to screw the frame together.

I use these m3 lock nuts. Extend the arms fully before tightening. The arms are supposed to touch the screws when fully extended. Be careful not to over-tighten the screws, but they should be tight enough so that they do not move during flight. Now the main frame is done.

Here is a simpler alternative to the V1 templates. I call it the coffin body and it’s easier to make as all the lines are straight.

I made this coffin body slightly larger as the person I’m building it for needs the additional mounting surface.
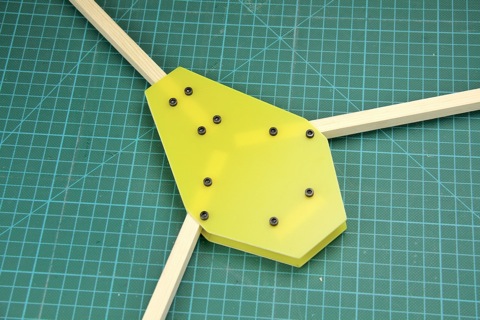
Simply take the V1 template and draw straight lines instead of the curves and you’ll end up with the same shape.

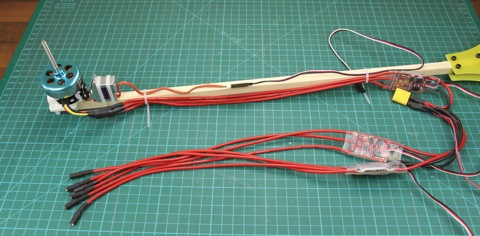
Time to fix the ESC’s.

Off with the heat shrink.
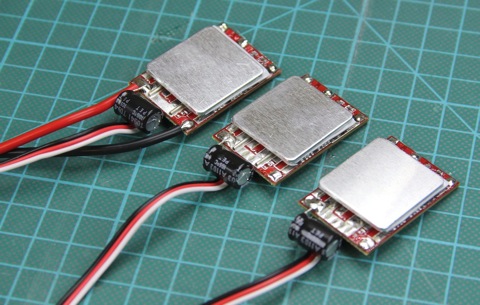
On two of the ESC’s, you should now remove all the cables except for the servo lead. On the third one, you should also keep the battery cables. This ESC will be the one on the tail and it just so happens that the cable is the right length to begin with.

New cables in place. Here are the cable lengths I used:
Back ESC battery cables: Stock (10cm)
Back ESC motor cables: 32cm
Front ESC’s battery cables: 18cm
Front ESC’s motor cables: 28cm
I used this 16AWG silicone cable.
Also soldered on 3.5mm bullet connectors.

New heat shrink. I used this nice transparent heat shrink that is nice and thick which helps protect the electronics. I have stripped the label from the original heat shrink, so that you can still identify the type of ESC’s, but this isn’t really necessary if you don’t want to. Looks nice though.

Time to solder the battery connector. (The thin extra wire is for powering FPV equipment) Here is a tip for soldering multiple cables:
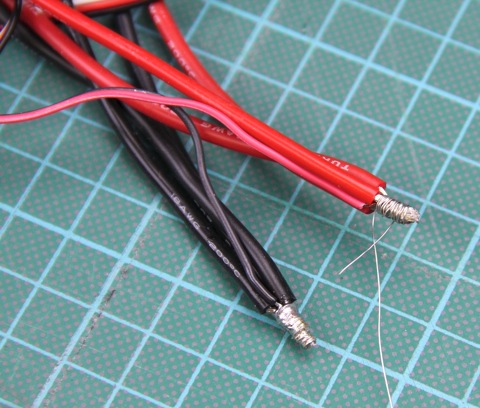
Wrap a strand of wire tight around the exposed end. This holds all the cables in place during the soldering, reduces the size of the solder joint, and it also adds a mechanical bond to the solder joint.

Connector in place.
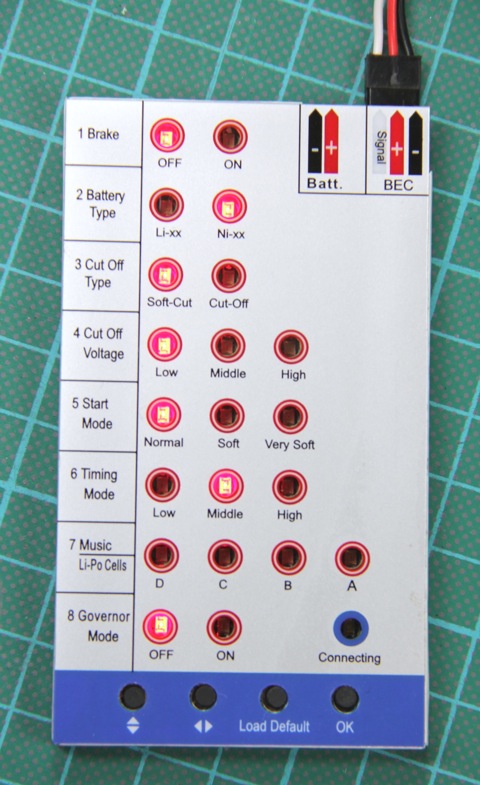
Now to the programming bit. I use this programing card. This is the settings I use on my ESC’s.

Now it’s time to make the new yaw mechanism. This is a bag of 40mm front wheel steering mounts. They are really inexpensive, one bag is enough for 2 and a half yaw mechanisms and costs under $2.5 here.

Take out two pieces.
Start by drilling up the hole to 4.2mm of ONE (just one!) of the two pieces.

Remove any scraps of plastic after drilling the hole.
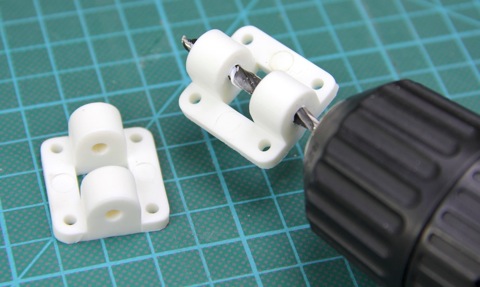
Place the pieces like in the picture and jam a 4mm rod through. It’s a tight fit in the piece that wasn’t drilled out, but that’s what we want. Use some muscles to get it through.
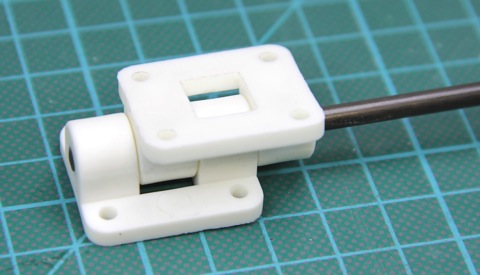
The rod should go all the way through but not poke out at the other end. I used a 4mm solid carbon rod to keep the weight down. The piece that was drilled out should move nice and smooth without any slop at this stage. If it’s not quite smooth, use an exacto knife or similar to wedge in between the two pieces and scrape a little to release pressure. Don’t remove to much though, you want a close fit.

Cut the rod. I used a dremel with a cutting disc.

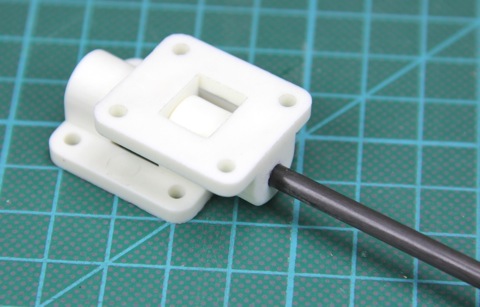
Done. It should pivot smoothly and without slop.

Sand the edge of the piece where the rod is stationary (the undrilled piece)
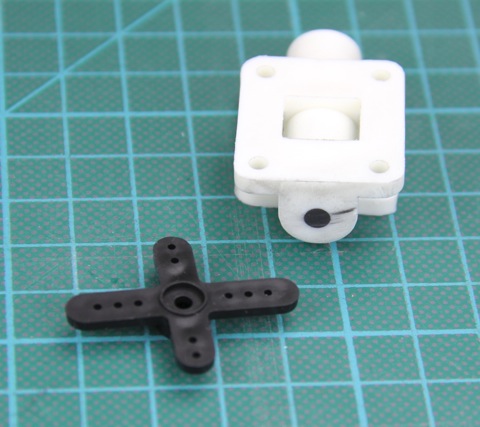
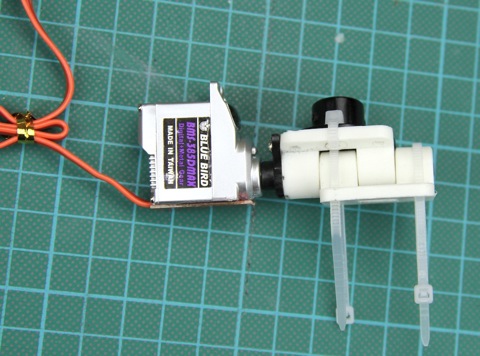
Time to connect the new yaw mechanism to the servo. The servo I use (BMS-385DMAX) comes with a cross shaped servo horn, which is perfect for this.

Sand the horn flat.

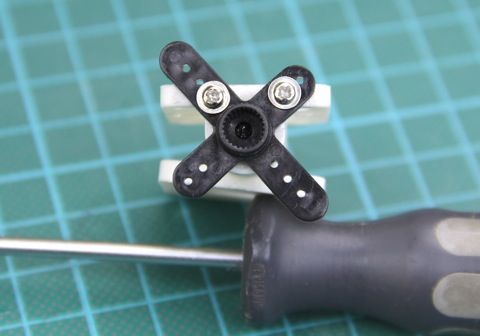
We’re going to drill two holes to fixate the horn, but to get good precision when doing this I recommend glueing the servo horn to the plastic using CA. Two things that is important; The servo horn should be mounted on the piece where the rod is stationary (the undrilled piece) and take great care to glue the horn in the dead center of the rod. If you’re off, there will be unnecessary strain on the servo.

Drill two 1.5mm holes through the innermost holes on the servo horn. Drill as deep or a little deeper than the screw you’re using.

The screws I used came from a HXT900 servo. Nice size and I had tons of them laying around.

Cut off the excess plasic of the servo horn.

The DT750 motors comes with a mounting base which is the perfect size. You just need to drill one hole in the middle of one side on the piece that has the servo horn attached. To get the most maximum throw I highly recommend drilling the hole on the same side as I did (see picture). This way the zip-tie used to mount the motor base will not limit the travel in the direction that the mount is already leaning to compensate.

Three 2.5mm zip-ties is all that is needed.
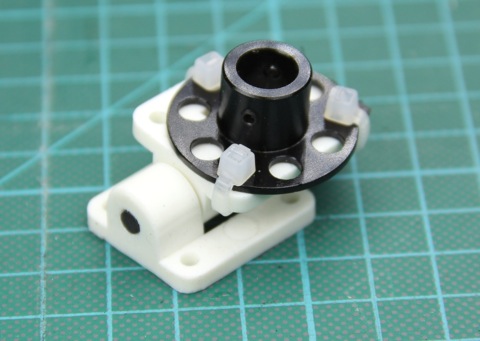
The zip-tie that’s closest in the picture should be mounted just like in the picture, not to limit the travel (That is to say over the short edge).

The servo needs to be modified in order to be mounted properly. Cut off the bottom mounting ear flush to the case.

To get the correct hight I added a 0.8mm thick glass fiber piece to the bottom on the servo. You could just as easily sand down the plastic yaw-mount, if you don’t have anything laying around with the right thickness.

Yaw mechanism done!
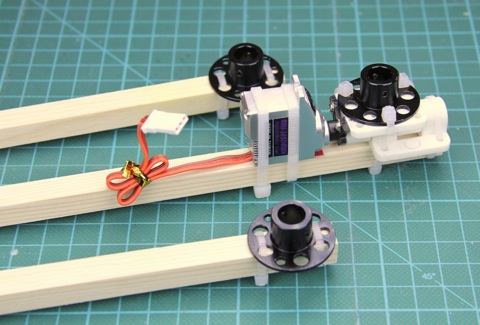
Time to mount the yaw mechanism to the arm. Zip-ties for the win!

Mounted on the arm. The servo is mounted with bigger zip-ties.

When mounting stuff with zip-ties it’s a good idea to have the ”knots” in opposite directions if possible. This ensures that the thing you’re securing remains straight. Use a pair of pliers to really tighten all the zip-ties, as this is all that keeps your tricopter parts together.

Started soldering bullet connectors to the DT750 motors. I like the DT750’s. They are pretty efficient. They also have high torque due to their wide bell. This means that the prop will change RPM faster and the platform will be more stable and have a quicker response. I also like the 4mm threaded shaft as you can mount the props straight to the bell without any extra weight or hassle.

A weak point on these motors are where the windings meet the heat shrink. If you wiggle the cables back and forth too much the copper wires will fatigue and break. To fix that and make the motors more durable I added some epoxy.
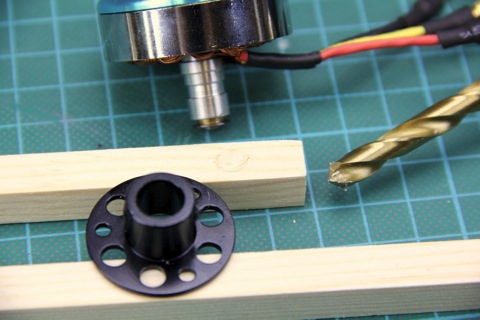
The motor axel can extend a fraction of a mm out of the bottom of the motor mount base, and to prevent it rubbing against the arm I simply drilled away a tiny bit of wood underneath the mount.

If the motor rubs agains the arm it will draw more current and create more vibrations. Simply drilling a bit of the wood away is a quick and simple solution.

Mount the motor mount using 2.5mm zip-ties. Simple, cheap and fast. It also helps save the motors in a crash.
All the motor mounts mounted.

The axels on the DT750 motors are way to long stock. The risk of an axel getting crooked in a crash increases with the length. I cut mine down to 21mm. This is a good length for a GWS prop and lock nut.

Now it’s time to put the motors in place. Always use thread lock on all screws that goes into metal. Otherwise vibrations will loosen these screws over time.
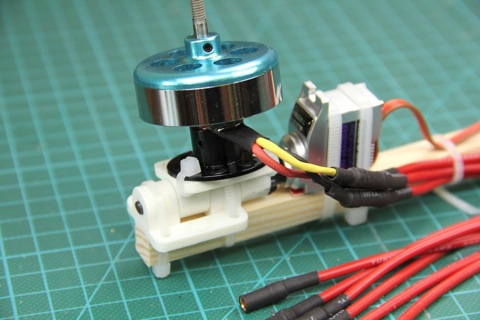
Mount the back motor with the leads pointing 90° out from the arm. This will ensure that the cables won’t rub against the servo.

Landing gear mounted with zip-ties and prop mounted on the motor. The prop needs to be drilled to 4mm. I simply drilled it out with a power drill. Make sure to use lock nuts, otherwise the props will come loose over time. Also make sure not to over tighten the props. The bell can be pushed down to hard and create unnecessary friction agains the bearings.
Test fitting of the rear ESC. I have also mounted the 420mm servo extension.

ESC’s in place.

Tail all done.

This tail mechanism has low friction, little slop, is really sturdy and present very little added drag underneath the prop. The servo is mounted vertically in line with the arm and the tilt mechanism is hardly any larger than the bell of the motor. This means that more of the air the prop moves is used to actually lift the platform. I really like the direct drive servo as well. No slop or extra linkages.

Next it’s time for a revised camera/battery mount. Notice the small slots. The original template can be found here.
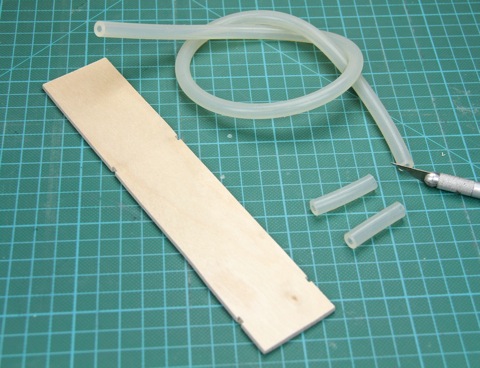
For vibration dampening I used some silicone tubing I had laying around. The dimensions of the tube is 8mm outer diameter and 3mm inner diameter. I cut two 38mm pieces.

I used 2.5mm zip-ties (surprise!) to mount the tubes to the camera mount.

Bottom of the camera mount plate.
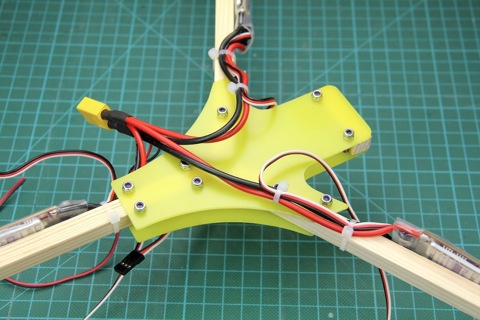
Bottom of the tricopter body.
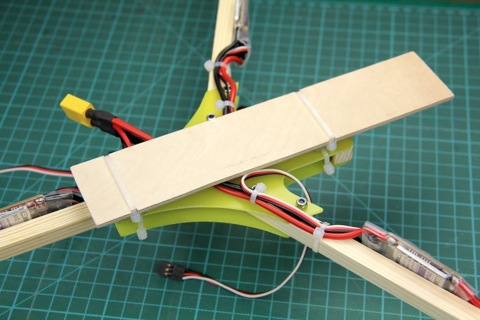
Camera mount fixed to the tricopter body. Another pair of zip-ties, of course.

A more detailed picture of how the zip-ties are wrapped around the body to fasten the camera mount.

This means that the only connection between the body and the camera plate is through the silicone tubing.

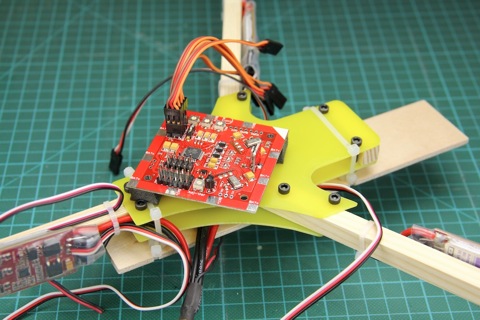
I still love the KK board and I found a really ridiculous cheap one from Singapore for $25! These boards are no longer available with the tricopter V1.6 firmware, the price has also gone up. I now recommend getting this board from Hobbyking. It comes stock with a quad firmware and has to be reflashed with the tricopter V1.6 firmware, follow this guide. Update: I now recommend the KK2 board which doesn’t require to be reflashed, and it performs even better then the old KK boards.To mount the KK board, I use double sided sticky foam tape folded over 6 times and then cut into squares.

Simply peel off both sides and smack onto the KK board and you’re done.
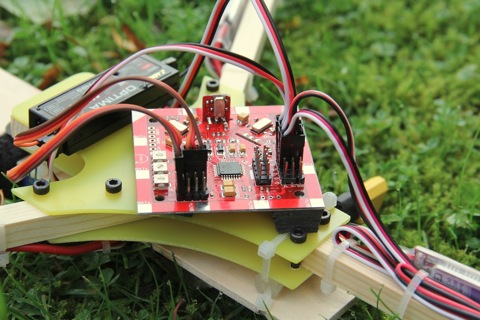
Only needs a receiver and a battery now.
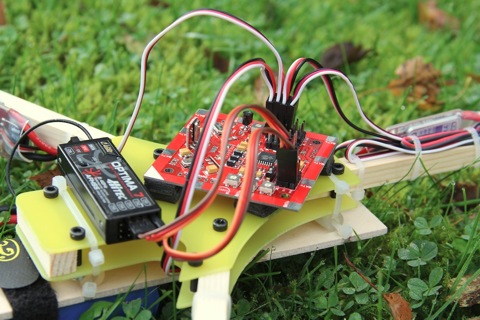
Done!

Folds up nicely for transport as well.


The new yaw mechanism works like a charm. I’ve had around 50 flights on it and so far so good. Still no slop and silky smooth.


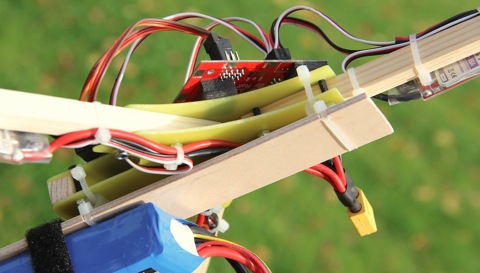
Battery is held in place with a Scorpion battery strap which is awesome! It’s a little sticky and once it’s tight it won’t move anywhere. It just grabs that battery and holds it in place. Sorry for being so exited over a battery strap, but I’ve been looking for ever for a good battery strap and I finally found it.

Lift off.

One thing it does not lack is power. The DT750 motors are capable of lifting much more than the 2213N motors.

The DT750 motors runs smooth and quiet. Flight time is around 12 minutes with a 3s 2200mAh (without camera mounted).
Here is a video of the Tricopter V2.5 in action:
Shopping list:
1 x KK board Recommend this one instead
3 x DT750 750kV Motors
3 x TURNIGY Plush 18amp Speed Controllers
1 x 3s Turnigy 25-35C 2200mAh LiPo
1 x BMS-385DMAX Digital Servo (Metal Gear)
1 x GWS 10*4.7 or GWS 11*4.7 for heavy lifting
1 x Front wheel steering mounts
1 x Transparent heatshrink
1 x 4mm heatshrink
4 x Red 16AWG silicone cable
1 x Black 16AWG silicone cable
4 x Male to male servo cables
1 x M3 Hex screws.
1 x M3 lock nuts
1 x M4 lock nuts
1 x XT60 connector
1 x Battery strap
1 x 420mm servo extension
1 x 3.5 bullet connectors
1 x Programming card
3 x 1.5mm glass fiber plates (min size 140*100mm)
(Due to popular demand I now offer pre-cut V1 tricopter frames!)
4 mm carbon fiber rod
40+ of 2.5mm zip-ties
3 mm thick plywood
8 mm silicone tubing
Blue locktite
CA glue
(Items without a link I’ve bought at local shops)



